|
|
|
 |  | | | | 这个玩意要高级设备测试才能定量分析吧。
超过了180度会产生震荡吗?为什么这个时候会产生震荡?
定性分析就是:开关电源本身是负反馈,相位就是180度了,再如果环路中增加相移就是360度,也就是说正反馈了,那就是接近崩溃了。这个是我个人理解。 |
|
|
|
|
| | | | | | | | | | | 稳定性标准
图1.14的下部显示代表一个带反馈运放电路的传统控制环路模型框图;上部显示与控制环路模型相对应的典型带反馈运放电路。我们将这种带反馈运放电路称为“运放环路增益模型”。请注意,Aol为运放数据资料Aol,且为运放的开环增益。β(贝它)为从VOUT上作为反馈返回的输出电压量。本例中的β网络为一个电阻反馈网络。
在推导VOUT/VIN时,我们能看到,可直接用Aol 及 β来定义闭环增益函数。

从图1.14所示的运放开环增益模型中,我们能得出稳定闭环运放电路的标准。详细推导如图1.15所示。
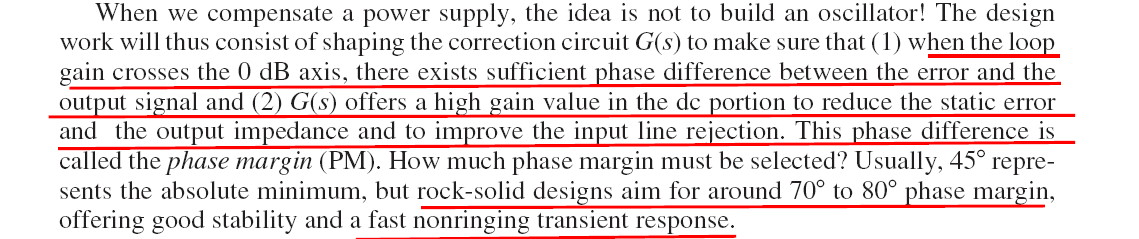
在频率fcl上,环路增益 (Aolβ) 为1或0dB,如果环路增益相移为+/-180°,则电路不稳定!在fcl上,环路增益相移距离180°的相位称为环路增益相位余量。对于临界阻尼表现良好的闭环响应,我们要求环路增益相位余量大于45°。

稳定性标准推导翻译如下:
VOUT/VIN= Aol/(1+ Aolβ)
如果:Aolβ= -1
则:VOUT/VIN= Aol/0 → ∞
如果:VOUT/VIN= ∞ → 无穷大增益
则VIN中任何小的变化(扰动信号,或小干扰)都会导致VOUT中的很大变化,而这又会反馈给VIN并导致VOUT中更大的变化 → 振荡 → 不稳定!!
Aolβ:环路增益
Aolβ= -1 → +/-180°相移,幅度为1 (0dB)
fcl:Aolβ= 1 (0dB) 时的频率
稳定性标准:
在Aolβ= 1 (0dB) 时的fcl频率上,相移< +/-180°
所需相位余量(离+/-180°相移的距离)≥ 45°
|
|
|
| | | |  | | | | | | | | | FCL:应该是穿越频率
上描述其实TI的一篇关于运放稳定性文章部分内容,感叹老外早已解释的清楚。不过这里只是解释了相位余量的标准,
环路增益Aolβ=-1时候为什么会有正负180度移相,而且正好是180度,为什么?
这里正负180度,是不是意味这相位超前180度和滞后180度?
个人理解是负180度应该是超前,正180度是滞后?欢迎高手纠错!!!!!!!!!!! |
|
|
| | | | | | | | | | | | | | | 看来,你被彻底搞晕了!
校正补偿跟180度没有神马关系。补偿的目的就是接近一阶或二阶的理想特性,就是-20db穿越,90或60度的相位裕量。 |
|
|
| | | | | | | | | | | | | | | | | 呵呵你这么一说更加晕了90度,60裕量,一般不是45度吗?90度第一次听说 |
|
|
| | | | | | | | | | | | | | | | | | | 含有积分环节的用45~60度的相位裕量,没有积分要90度的相位裕量才好,这是本人的观点。
你可能从未听说过!
|
|
|
|
|
| | | | | | | |  | | | | | | | | | | | 为什么一般是45°?
如果相位余量大了,会出现过阻尼情况情况导致系统响应速度不够快;如果相位余量小了,会出现欠阻尼的情况,容易引起震荡。所以一般为了使系统反应速度快而且工作稳定的条件下,工程上一般都余量45°比较好,凡事都是一个折中的选择。 |
|
|
|
| | | | | | | | | | | | | | | 幅值裕度为1时,相位刚好为180意味着闭环传递函数特征方程1+Gk刚好等于0。意味着特征方程在虚轴上有一对共轭极点。右半平面有极点系统不稳定大家已经知道了,虚轴上有极点刚好在稳定与不稳定之间。也就是临界稳定。所以裕度就是离临界稳定还有多远。实际上虚轴上有一对共轭极点就是一个ξ=0的振荡环节。只会这么多了。
|
|
|
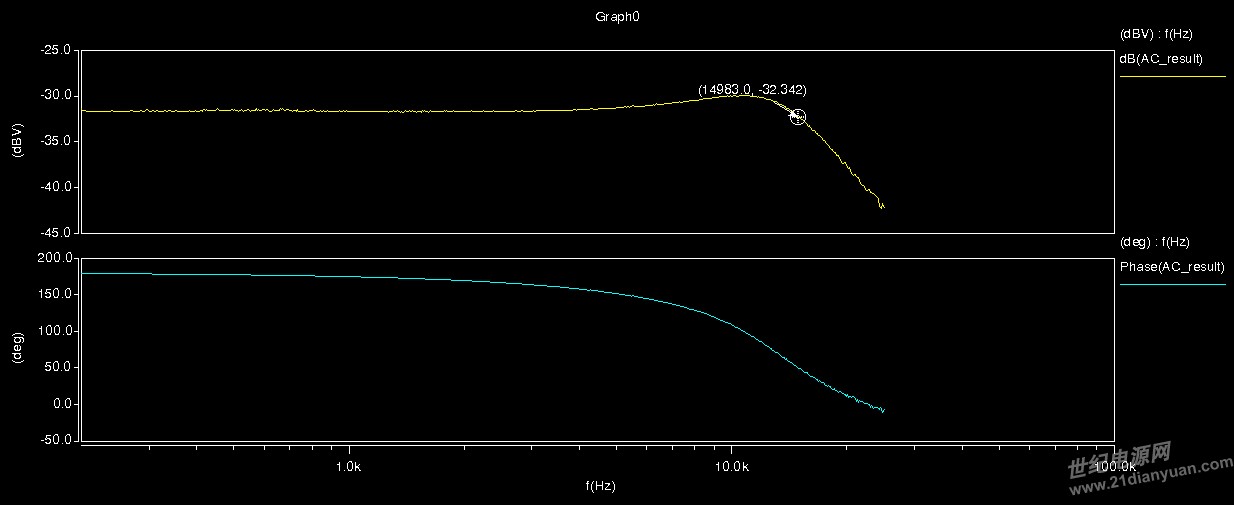
| | | | | | | | | | | 下边的是LLC电路(包括了分压电路和压控振荡器部分,唯独不包含补偿电路)的伯德图,愿听大师高论 |
|
|
|
| | | | | | | 定性分析就是:开关电源本身是负反馈,相位就是180度了,再如果环路中增加相移就是360度,也就是说正反馈了,那就是接近崩溃了。这个是我个人理解。
这句话我之前还没看到,好像有道理!我们以前分析是正反馈的话。一个信号从电路图一端进去,然然正负正负的画过去。如过反馈到最后都是正的话,那就是正反馈了。
这个谁可以再画个图来说明下。 |
|
|
| | | | | | | | | 一个系统如果能够保证在相位180度时,增益小于1,这就意味着,不会产生自激振荡。
如果大于1,则输出就会发散振荡,受制于电源电压的限制,就出现了疑似自激振荡的症状,但本质上是小信号的发散振荡。
如果等于1,当然就是自激振荡了。
这里说的是开环。
|
|
|
| | | | | | | | | 可以参考模拟电子技术书本里面负反馈章节,里面有详细的正反馈流程图。 |
|
|
| | | | | | | 你的理解和Basso的解释是一样的啊。把你的翻译证英文的话,如下:

这是Basso帮你翻译的。 
|
|
|
|
| | | | | | | | | | | 这是Basso的一本书,全名叫Switch-Mode Power Supplies - SPICE Simulations and Practical Designs。论坛里有打包好的提供下载。  |
|
|
|
|
|
|
|
|
| | | | | | | | | 上面理解的已经很到位了,看看模电书吧,那里有准确的定义.明白增益裕度是针对闭环系统而言的,如何避免振荡提出的就OK了. |
|
|
| | | | | | | | | 个人最近在学习放大器,边学习边总结,正好有裕度问题,粘出来你看看,一些示意图没画.
系统开环时因为温度问题,器件,增益稳定性问题会使系统工作不稳定,才引入了负反馈,但如何设计负反馈,主要就是要注意避免因为引入负反馈而引起振荡问题。所以稳定裕度是针对有反馈系统而言的。反馈深度越深,放大电路的性能越优良,然而反馈过深,有时放大器不能稳定的工作,而产生振荡现象,称为放大电路的自激。
稳定裕度(增益裕度和相位裕度)(针对反馈系统而言的,开环稳定问题另当别论??)
稳定裕度是指:是使反馈系统进入不稳定状态所需增加的环路增益,环路增益是频率的复数(向量)。增益为其模,相位为其相角。
增益裕度:当相位偏离DC状态(滞后原初始相角)为-180度时所对应的环路增益与环路增益为0dB之差。一般要保证≤-6dB。
相位裕度:当环路增益为0dB时所对应的相位偏离与-180度只差。一般要保证≥45度。
|
|
|
| | | | | | | | | | | 嗯,你能按国内的教材越学越明白才怪呢!
振荡是振荡,自激振荡是指的没有信号输入,但确有输出的正弦波振荡,这才是自激振荡。
负反馈的振荡,如果增益为1,而相位180度,则就是正弦波振荡。
但这样教科书说的自激是不一样的,负反馈在相位余粮大于0而小于通常所说的45度时,会欠租尼振荡,对于小信号电路来说,但对于受制于电源电压限制的负反馈电路来说,会发生貌似正弦波振荡的振荡,但其本质不是没有输入就有输出的震荡。
简单的说,就是自激振荡是正弦波无输入就输出的自己振荡。
而教材所谓的自激振荡,从小信号电路的角度看,是相位余粮大于0的衰减振荡,只是电源电压的制止,而出现了貌似自激振荡的现象而已!
|
|
|
| | | | | | | | | | | | | <li id="r_548469"> 25楼 bridgnsl
| 工程师
你的这句话可否详细介绍一下。 负反馈的振荡,如果增益为1,而相位180度,则就是正弦波振荡。
|
|
|
| | | | | | | | | | | | | | | 在负反馈框图里,一个放大倍数为1,相位180的信号,在被0减去后,就是这个信号本身,所以是因为自己的存在而导致自己的再次存在,就是自己振荡,或自激振荡。这只是理论上的情况。现实中的自己振荡,必须要满足180度的条件,这是必要条件,而放大倍数为1,一般都是通过夫负反馈得到,或LC之类的三极管震荡电路,是因为电源电压的限制以及所谓的选聘而导致的不的不稳定。你未必一定会需要很明白如此振荡,只是因为现实期间精度限制,而几乎根本不可能为放大倍数为1,通过负反馈作用保持1是同窗的做法。你不需要非得明白。 |
|
|
| | | | | | | | | | | | | 一般把一个系统看成是线性系统,判断一个系统稳不稳定,和你输入没有任何关系(当然输入要有界),采样输入电压可以看成是系统的激励,输出电压是响应,把信号传输的所有过程建立模型,写成系统函数,以此判断零极点的位置即能判断系统是否稳定.放大器自激只不过是一种特例,可以说它是环路的一个部分,但本质上是一样的. |
|
|
| | | | | | | | | | | | | | | 放大器为什么会自激,开环增益A是频率函数,可以理解放大器是有输入电容,才导致(纯电阻)反馈信号有了相移,这是感性上做的解释,但建立个合适的模型,就会明白自激原理和整个闭环系统稳不稳定是一样的.平时那些输入(相电压)电压或输出负载的变化..,可以看成是扰动,所设计的系统,首先要满足在这些扰动下也能够工作.当然也可以把最初输入电压看成是激励,最后输入看成电压是输出,PWM这些,都可以看成是整个系统的中间环节. |
|
|
| | | | | | | | | | | | | | | | | 你说的这些都是 属于 小信号的线性范畴,但实际的电路,受制于电源电压的限制,这个看似非常简单的问题,很可能几乎就是个无人敢碰的难题,只是很有可能罢了!而通常教材所说的自激,基本都是因为电源电压的限制而导致的小信号衰减振荡而出现的貌似自激振荡现象,所以几乎没你个人明白也不奇怪。
|
|
|
|
|
| | | | | | | | | | | | | | | | | | | “受制于电源电压的限制,这个看似非常简单的问题,很可能几乎就是个无人敢碰的难题”,貌似现在都是采用器件极点(instrumental poles)的方式来解释输出无法超过器件供电电压。我倒不觉得这个难题会是无人敢碰的,从哪一个角度来讲这种现象都是可以解释和理解的。
个人认为如果能拿着国内一本公认很好的教材仔细研读(不包括那些仅仅为了赚钱而写的教材),很多问题都是有解释的,如自动控制原理,每次返回去读都有新的发现。
|
|
|
| | | | | | | | | | | | | | | | | | | | | 这句话就是某国内较著名的自控书里面的一句意译。
书海拾过去的好,至少你可以了解这么课程的来龙去脉,而不是像现在的人知其然不知其所以然。
自控原理都是线性的理论,所以与实际情况相差甚远,至少运放的输出受制于电源电压的限制,就是其不涉及的。电子技术至少还有spice可以用来仿真非线性嗲路,可自控又有神马呢?对于非线系问题?应该是没有的。
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | 先生高论,我个人觉得,自动控制或电子只是应用领域的划分概念而已,而控制方式都是一致的,或线性,或非线性,每个领域都有其自身特点,并没有什么本质区别,控制技术有经典控制和现代控制,侧重点不同而已,关键是各个领域要根据其本身的需求去实现最具性价比,最易实现,最易观测,的方案。
自控的课程偏重线性分析,那也是入门的手法,简单的手法,要处理和分析非线性系统还有自适应控制、模糊控制、鲁棒性控制……
无论是那种控制方式,理论分析到最后还是要归结为数学的方法,物理的实现方式都要归结为器件,先生以为如何? |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | 你说的这些都是线性系统,自适应也是线性系统的分析,不是非线性的。
非线性的可能有,但可能很难应用。
电子技术与自控最有共同语言就是稳压电源,特别是开关电源了。
电子技术的反馈设计方法种类之多,想法只独特是令自控工作者望尘莫及的,但通常自控工作者还瞧不起电子技术工作的不懂反馈原理,但的确可以在实际电路中行之有效,最极端的情况就是连接错线都可以导致一些电子技术的发明创造,而自控工作者则从来没有如此好的运气,相对于电子技术的几乎无限的可能设计,自动则就那么可怜的几种方法。
虽然如此,自控也是研究的线性系统,才能得到一些解析表达式的结果,作为非线性系统只能仿真而很难有解析解之类的东西。
线性小信号电路只是对实际复杂的电路的一个想当然的非常简化的做法,实际的电路的某一个工作点上的小信号线性电路,然而即使是buck的一个工作点的传递函数,当负载变化时候,其传递函数也是变化的,是严重非线性的,所以仅仅在局部小范围变化才合适。如果分成不同的几个工作点,例如最大输入电压和最小负载等等几种情况,那么可以保证每个都是稳定的,这的确比之用一个工作点好的多,但不同工作点之间变化时,也是严重非线性的,这个动态的过渡过程是很难分析的,但稳定后,是在设计补偿的范围内的。
电源电压也是一个非线性问题,但好在一般来说,只要小信号问题,在考虑电源电压限制后的非线性电路也是稳定的,小信号此时很像是最坏情况的计算。
一般来说如果理论于实际的情况符合的很好,就是个合适的理论了,否则就是完善理论一逼近实际的情况。就是抓主要矛盾的过程,理论的升级,一般也是把以前的次要矛盾当作主要矛盾。数学的方法还是线性系统比较成熟,而器件在几乎都是非线性的。
|
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | 模拟电子电路几乎都是负反馈电路,所以要按照自控方法,将其电路的高频特性等效成自控的反馈方框图就可以了,就是与自控完全一样了。电子技术凑是的成分较大,一般凑是奏效,关系其反馈框图形式的就不多了,好使就行。
然而问题就是,所有的控制或电子电路都是非线性的,所以通常的小信号近似只是个没办法的办法而已,有总比没有强,至少可以研究局部的稳定问题。虽然从整个范围看来非线性严重。对于电路,也的确存在就是非线性比较严重,但控制效果依然可以接受的情况还是有的,所以从小信号的角度,效果也可以满意,所以人们都把注意力放到小信号上,而对于整体的非线性问题重视不够,但仿真的确可以从计算的角度给出接近实际的结果。比经非线性很难有解析解。
总的来说,实际问题比较严重,绝不是书里只谈论线性系统那么简单。
|
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 还是学好哲学吧,具体问题具体分析,对事物认识的过程就是个反复的认知过程。书是要看的,并且要深入的看,但千万不能看死,思维要经常跳出来,归一----发散,发散---归一,最终皈依佛门吧 |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 最近看了自控,对放大电路认识有了进一步的认识,哇O(∩_∩)O哈哈~ |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 从建立简单的近似等效模型,再慢慢深入分析,一步到位,神人啊 |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 这个世界是数字的呢,还是模拟的呢,模拟-数字,数字-模拟,很多问题和先有鸡还是先有蛋一样无解,宇宙可能本身就是离散的 |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 不管小信号还是大信号电路,都可以使用自动控制原理来分析,模拟电路中的关于运放正、负反馈电路只是自动控制原理一个小小的应用领域罢了,以前个人只是沉浸在模拟电子技术中的电路、元器件中,但也未尝不是一件好事,当你对一个领域的认识达到登峰造极的地步,(登峰造极并不是想象中高不可攀的,多么多么深刻高深的难题,反而是指明白很多最基本,最幼稚的问题。最简单其实也是最难的),你会很快触类旁通其他学科,这也是为什么很多大的物理、数学家往往并不是科班出身,很多都是法律、哲学、业余选手出身。即使我们不能和他们比,但至少要真正的理解他们的一些基本理论。
言归正传:开环是开环,闭环是闭环,反馈是反馈,把他们当做三个独立的概念吧。(传递函数和开环传递函数是两个不同的概念)如何设计闭环系统自控书上有它的步骤,首先,根据稳态误差确定开环增益系数;其次,写出闭环(带有反馈的)的开环传递函数,根据此函数(如波特图)分析系统的稳定性(主题所说的增益裕度即是这里的开环传递函数的频率特性,定义如我前面回答的,再次,根据分析结果,判断此函数的频率特性是否满足需求,不满足可以去加一些补偿网络比如无源RC,有源的PI,PID等等等等,改变开环传递函数的频率特性以满足需求,反复修订参数。(这里的开环增益和一般的PID里的P是两个不同参数)。这些是最基本的东西,但只有真正理解了这些概念才不难理解为什么要如此如此,这般这般这样做,下面就是如何去做,去设计的问题的啦。。。本人知识有限,这里算是抛砖引玉啦。 |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 这里再对楼主的提问回答下,你的问题1,2完全可以使用模电书上的增益欲度的概念去解释,只是强调下环路增益就是开环传递函数(模拟电路上的单运放反馈电路)。你的问题三极管电路,你得判断它有没有引入反馈,如果有是局部反馈,还是全反馈,比如,共射极电路,射极下串个电阻,这是引入了负反馈,但是,反馈的不是集电极输出的电压而是射极输出的电压,射极电压是和基极输入信号是同相的,即反馈信号相移是0度不是180度。 |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 你的理解相当发散!就像一个传递函数,闭环的,出现了右半平面极点.无论开环闭环,都是围绕闭环不发散震荡展开的,但不发散震荡之势一个最低要球,还要有好的动态过程,但到目前为止,人们只到2阶环节,能够得到二阶的不震荡相应,就是通常人们说的60度相位裕量,但是实际的系统,就算有60度的相位裕量,只是不会发散震荡,除非与二阶完全一样,否则也达不到二阶理想的60度相应过程,只是比较接近罢了.
对于相位裕量的理解,人们通常还只是停留在不发散震荡的基础上,貌似从来没有人解释过60度相位裕量的理由,但是毫无疑问,如果开环的高阶系统,零点和极点都正好抵消,而只剩下60度相位裕量的二阶系统,则显然是最快的五超调震荡的理想校正环节了.
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | [size=13.63636302947998px]貌似从来没有人解释过60度相位裕量的理由
有人解释过了 |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 你说的是对的,2次滞后电路容易引起振荡。高次不是不能解决,是实际碰到的 问题,多次是不是可以等效成多个1次、2次的级联,就像高次滤波器一样,会分析1次,2次的以此类推。看高次的分析的文献比较少,接下来再看看。60度的理由再想想 |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 我想请问一下,在伯德图中,要求整体电路的开环传递函数在穿越频率处以-20db/dec下降或者是-1,能不能帮忙解释一下为什么有这个要求? |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 这个是为了保证有比较稳定的相位裕量吧。-1斜率,相位曲线衰减比较缓慢。如果是-2,-3斜率,那么相位衰减就会非常严重,如果当前设计满足环路增益裕量和相位裕量的要求。但是因为元器件参数的容差,工作条件的变化,导致穿越频率右移的话,-2,-3的斜率就会较大的降低相位裕量,相位裕量不足,很容易造成震荡,过冲。新人刚学习环路,错了的话请总工指点。 
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 请问,为什么反馈的会是射极的电压呢,射极的电阻接地了,它是怎么将信号反馈到基极去的呢? |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 如果射极是纯粹的没有电阻,共射极放大电路可以理解为开环控制了,不存在反馈。当然此电路抗干扰能力就差。也不存在什么裕度问题,这也是我前面说的,分析一个电路或系统首先就要判断它有没有引入反馈。 |
|
|
|
|
|
|
| | | | | 你得针对具体环路具体分析,首先确定三极管设计反相放大器是否引入反馈,你没有引入反馈何谈裕度. |
|
|
|
|
|
|
| | | | | 其实环路是360°的相位,但是我们的反馈都是负反馈,本身就180°了,所以还剩180°的相位裕量 |
|
|
|
|
|
|
|
|
|
|
| | | | | | | | | 巩固一下
当然输入信号的频率在开环增益=1时候,(0db处,此处也叫穿越频率)系统开环输出相位延迟必须小于360度,也就是输入与输出必须小于360度。如果减去负反馈的180度延迟,那么就是输入与输出必须小于180度,那么通常我们说的要有35~45度余量,也就是整一个环路的延迟应该是145度~135度(不计180度负反馈延时)。这样的系统在小信号范畴相对稳定,
那么这个35度~45度就是相位裕度,在波特图上观察点应该是在穿越频率点
|
|
|
|
| | | | | | | | | | | | | 呵呵,我们一般开环传递函数相位裕量讨论,习惯是不包括负反馈的180度延时。
其实24楼说明白了,我开始还以为他的错,现在确定他说的是对的,有180度余量,但是不能打满180度。
要剩一个30~45度余量。 |
|
|
| | | | | | | | | | | | | | | 恩 相位裕度是和180度比较的,在没有任何相移的情况下,负反馈相位裕度是180度 |
|
|
| | | | | | | | | | | | | | | | | 相位裕度是和180度比较的?
你这么回答,跟我理解有很大出入,要门我之前理解完全措了,
要么就是你错了。但是我感觉你理解错了。而且你相位裕度没有真正理解。
相位裕度绝对不可能是跟180度去比。没有这样说法的
所谓相位产生是输入信号与输出信号之间的相位差。 |
|
|
| | | | | | | | | | | | | | | | | | | 相位裕量就是和180度比较的,看来你过去不明白,现在依然不明白,将来也肯定不会明白的。看来你死抠书本,也抠不出什么正确道理来,本大师认为,你还是算了吧,何必纠结于此呢,干点啥不好的呢! |
|
|
| | | | | | | | | | | | | | | | | | | | | 纠正一个错误相位裕度是跟180度去比较我74楼出错了。
我之前74楼为什么说神奇的电没有理解。
如果说要理解相位裕度,单纯那就话相位裕度就从180读去比较。我觉得不够对于初学者来说是理解不了的。
这样的理解也不会真正理解相位裕度意义。
因为相位裕度意义本身不只是为了180度比较。
他真正意义是整体系统相位差要有余量,保证在干扰信号或扰动信号串入系统后,系统不能产生正反馈,不产生自激振荡。
那么系统输入与输出整个系统之间的相位差不要达到360度。否则的话系统就要产生正反馈了,震荡了。
这里我想对65楼bridgnsl| 工程师 说几句话?呵呵
对于初学者来说书还必定要多看。还不能看一本。搞我们这一行的对于存在的问题,如果在自己没有真正深入理解的时候,比必须要究其根源。不罢休的精神,直到弄明白为止。没有这样的精神,那就别搞研发了。
另外,我想整个论坛里没有人敢把自己称为大师,你居然把自己称大师,牛啊!
说一些深奥让初学者难以理解的概念。就是大师了吗?
我觉得很奇怪你怎么知道我只死抠书本,没有实践呢?
好吧这么说也算了,你居然还能预知我的未来也不能理解。有点过分了吧,你难道比那些摆摊的大师还厉害,居然能预知我的未来。
呵呵。开个玩笑不要介意。
我觉得真正大师他必定不会自称大师,应该是比较谦虚的。为人也比较谦和的。做人还是谦虚点好。
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | 本大师的意思是,你对这个问题,到现在都不能真正理解是怎马会事情,看再多你还是不明白的意思。
你不是真的觉得自己已经明白了吧?
本大师说了这么多,对于你来说都是废话吗?本大师不就是在提示启发你吗?如果你还不明白,本大师还能说山马呢?
坛子里没人敢把自己称为i大师,本大师就不能说大师了?你怎么知道本大师,不是大师呢?
刨根问底,正是本大师鼓励的精神,但不能以错盖正吧?你泡了跟,但没有得到正确答案,你这不。。。
本大师从来都是用最简到的道路说名负砸的道理,你要是看不懂,不明白,本大师也没必要对你多说神马。
因为你现在还是不懂,为什么这么说嫩?因为本人是大师啊,不服不行啊!
你把本大事比作摆摊的,说明,你还是压根不懂,妄图诬蔑本大师而已。
因为你过去不懂,现在还是不懂,依次来预测你的未来依然不懂,不符合逻辑吗?
本大师就使大师,不仅是大师而且还不为大师的称号而感到骄傲,那是非大师的作为,不管其口头表演的多莫谦虚,掩盖不了其未不实的内心啊?你觉得呢?
虚伪的谦虚你见的不少,真正的谦虚你可见过?
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | 最近出差,有段时间没来了。大家还在讨论这个问题呢,精神可嘉。现在对频率补偿越来越困惑,尤其是PI、PID补偿与一般放大器电路的频率补偿是一回事吗?是又不是吗?至于开关电源的反馈控制,还是动手从头到尾做一个可能会理解的更好。最近做一个数字PID 的感觉很好理解,但如果使用模拟PID控制器,该如何设计,关于模拟PID设计的文献几乎没有,有没有推荐的文章,急需。 |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | 理想的频率补偿就是零极点的抵消,PI对于一介惯性环节正好抵消,PID对于二届惯性关节抵消,这是理想情况,可以得到闭环一介惯性响应,无振荡的。此时使用的运放都当作理想的,虚短虚断,PID就是这么实现的。你可以用运放实现P,I,D功能之后相加,得到模拟PID,好像有人这样做。
PID自控人用的多,过去说80% 的回路控制都用PID,近几年有见到提高到90%之说,最近又见到99%之说,没准以后就使PID的天下了,经管以前也是这样。
模拟电路运放当作理想且积分就使这样了。大量的模拟电路没有明显使用积分,此时运放就不能当作理想的,当然使用几分的运放当作理想知识近似而已。有一些补偿方法,没有几分,所以其开环要接近一届的为好,此时-20db穿越,相位裕量为90度为好。如果有积分,就按二届的补偿,-20db穿越,60db。
这个道理可能国内外都无人明白,当然可能也有,只是通常的书籍资料从未回有人说明而已。第一个提出-20db,60度的人不知道是谁,但他知道自己为什莫要这样做,后人也继承了下来。除了逼近二届无振但环节外,貌似无其他解释,貌似这个坛子几年前的帖子,也有人意识到这一点。
自控人的PID更多时凑是,没有bode图的补偿问题。的确,模拟电路的反馈补偿同自控PID的不同方法的,很多人有此疑问或兴趣,本人看法是模拟电路除了稳压电源同自控有共同外,其他的确模拟电路有自己的方法,但无积分又要60度知识个有比没有要好的方法而已。
频率补偿根本不是神话高不可攀的东西,可能很简单,也可能是个值得研究的课题,但没有人去做。区区几种的补偿方法,未必是全部,也许你在自己的实践中会发新更好的方法,也被不住。
实际系统是复杂的,但总可以做出反馈框图,既然对于一介和二届已足够了解,令复杂系统,逼近一二届总是个没有办法的办法,况且这大致可以做到,不排除-40db穿越,30度相位余量,阶跃响应稳定的可能存在。
|
|
|
| | | | | | | | | | | 在反馈框图中,要想输入为0就有输出,那么开环的相位必须是180度,因为180度代表反相,被0减去后,才会是自己,所以自己维持自己振荡。要想不振荡,那么就不能开环相位180度即可。为了获得更好的无震荡效果,逼近一节或二节总是好的,所以就有45度或更大的相位裕量之说。
如果180度时,开环的,增益大于1,就是发散正当了,相当于闭环出现了右半平面极点。
相信你是不会明白的!
|
|
|
|
|
| | | | | 我觉得大力兄如果能对自己认同的或不认同的观点稍微进行一下总结会更好,楼盖太高了,看起来很累的,而且会越来越偏,你觉得呢? |
|
|
|
|
|
|
| | | | | | | 相位裕度和相位余量是两个概念!!
相位余量最重要。。 |
|
|
|
|
|
| | | | | 第一句的理解不对哦。
相位不能超过180度,不是针对输出信号与输入信号而言,是针对输入信号和反馈信号而言。至于为什么会45度余量是最合适的,是因为我们在分析一些高阶系统时,常常把它们近似为二阶系统,而二阶系统在相位余量在45度时会有最佳阻尼比。阻尼比大了,系统稳定度会提高,但动态响应就变差。阻尼比小了,系统响应变快,但稳定度变差。形象点来说,阻尼比跟开环极点在S平面的分布有关,开环极点一般是个复数,有实部有虚部,实部跟虚部刚好相等时,就可以获得最佳阻尼比了。这一点你可以看看自控书里面的根轨迹分析法。
第二句话,相移产生180度,一定会产生震荡吗?不一定会震荡。就如前面你说的,只有在相移到了180度的时候,开环增益依然大于0db,这时候就是正反馈,肯定会震荡。但相移超过180度时,增益已经衰减到0db以下,这时依然是负反馈,不会震荡的。要不然,拿那些高阶系统来说,相移迟早会超过180度,它们一定会真震荡的话,电路还怎么工作呢?
至于你后面说的共射放大电路,如果发射极没有电阻,这时候这个电路就是开环放大,没有引入负反馈,放大倍数是Rc*Hfe(Rc是集电极电阻,Hfe是三极管的电流放大倍数)。如果发射极有电阻,那么就相当于引入了负反馈,放大倍数就是Rc/Re,发射极电阻引入的反馈是没有相移的,所以不会震荡。
|
|
|
| | | | | | | 兄台好久不见了。
1. 最佳阻尼比是对闭环而言的?相位裕量是对开环而言,两者的关系好像不是这么直接。
2. 发射极没有电阻,(电压)放大倍数不是Rc*Hfe,是Rc*Hfe/rbe 。 |
|
|
| | | | | | | | | 谢谢大师的指正。
今年比较忙,有工作上的,有私事,所以上论坛少了。
很怀念以前和bluesk、wsh5106在论坛为一个问题争论的日子,还有大师您深不可测的水平。
1、对最小相位系统而言,阻尼比越大,相位裕量越大,阻尼比越小,相位裕量越小。典型二阶系统的阻尼比和相位裕量是的关系是可以量化的。
2、放大倍数确实应该是Rc*Hfe/rbe,只顾着想BJT是流控流型器件了。 |
|
|
| | | | | | | | | | | 兄弟多来哦,感觉坛子不像以前那么热闹了。
我说的关系不那么直接,是指cos(φpm=45°)不是等于 ζ (0.707)这么直接
是的,它们的关系大致可以量化,就如Erickson或Basso所述。其实有关的内容在一本讲Opamp的书里也见过,可能比Erickson的书还早(不确定)。
|
|
|
|
|
|
|
|
| | | | | 输入信号-反馈信号=净输入信号
因此,负反馈的输入信号和反馈信号应该是同向的,若反向,则变成正反馈。
闭环稳定,就是在0dB时,相位应>-180度(此时相位为负的),同样的,就是在相位为-180度时,增益必须<0dB。
相位裕度,就是穿越频率(剪切频率)处,也就是0dB处,此时的相位与-180度的差值。 |
|
|
|
| | | | | | | | | 负反馈的目的是为了使得系统保持稳定,输出信号被采样后,经过处理用来控制输出信号的稳定,这就会形成一个控制环路,采样信号应该和输出变化是反向的,即相位差180度。但控制环路中并非都是电阻,存在滤波电路,或器件存在容性分布参数和感性分布参数,不同频率的信号在这些器件上会产生不同的相移,如果在某个频率处,采样信号和输出变化没有了相位差,且此时幅值增益大于1,就形成了正反馈,则会形成震荡,系统失稳。
|
|
|
| | | | | 严格意义上,对于最小相位系统而言,才有这种说法,严格的稳定性判据要看劳斯稳定判据。 |
|
|
|
|
|
| | | | | 这个要从物理意义上理解比较好。
假如输出端一个标准的正弦干扰,若开环的相位余量为90度,则环路补偿的输出的控制信号和输出的干扰信号叠加理论上就为0,即消除了干扰。
反之,过相位余量太小,则环路补偿的输出压制输出干扰的效果很差,即系统不稳定 |
|
|
|
| | | | | 隔了一年之后,对相位裕度的认识更深了,其实严格来说判断稳定的还是极点的的位置。 |
|
|
| | | | | | | 对开关电源来讲,在穿越频率处,引起的相位,就应该是滞后吧,不可能有超前的吧? |
|
|
|
| | | | | | | | | | | 这些最后讨论都回归到数学上面了,慢慢的抽象上去就是学习的基本理论了
|
|
|
|





 收藏
收藏 分享
分享





 津公网安备 12010402000296号
津公网安备 12010402000296号