 |  | | | | 大家先说说,我自己也到时候说说自己的看法,让大家指正!
1.开关电源是病态的非线性行系统,不是线性系统,那么经典控制理论,PID调节能用到开关电源里吗?
2.我们设计开关电源的补偿,用的是频域里面的方法,可是调试的时候,我们眼里看到的是时域的波形,这个之间的结合,或者说的转化,频域能间接反映时域的问题,时域也能反映频域,如何根据时域的波形看出频域设计是否合理?或者说,我们怎么通过这个时域波形看出你设计的补偿是最好的那个,或者说近似是比较好的(稳态精度高(误差小),动态性能好(负载切换),稳态性能好)
3.大家是如何解决一些参数的变化带来的问题,如输出电容的ESR不确定性,高频电路里带来的分布参数,那么我们设计一个电路的补偿,是根绝一个数学的模型(开关电源建模)来进行分析开环的幅频特性和相频特性,借此根据自己想要的或者说标准的bode图性能来推出补偿电路的,可是在高频实际PCB板里面这些会出现差异,我自己也之前做过实验,发现这个和自己所用建模的模型图像还是有比较大的差别,结果相当于在一个本身就不准的基础上来设计一个补偿,当然结果是不行的,大家有没有比较好的改善方法和意见? |
|
|
|
|
| | |  | | | | | | | | 呵呵,你说的也是,我也是做了实验过后,突然想到的。好吧,那我就换个方式来提问。
假如,已经设计一个开关电源,可是我见到很多人在调试过程中,会只是改补偿网络的电阻电容值,但是他凭什么来改变这个补偿网络呢?肯定是发现了什么问题,即从这个电源调试中得到一些信息了,一般这个是从示波器中得到的,那么我想问的是,从示波器看一些点的波形,是时域波形(横轴为时间轴),这个时域的波形能反映的问题是什么,以致于我们觉得是补偿网络不合适,而去调节这个补偿网络?如何根据这个波形来判断这个补偿改怎么变化的? |
|
|
| | | | |  | | | | | | | | 补偿做不好,电源负载调整率和电压调整率都会很大。我计算仿真,零极点匹配的目的就是获得最小的负载调整率和电压调整率。现在就在调数控Boost的补偿,算也算了,调也调了,负载调整率还是比较大。有转向看书了。(还没毕业,说的不对请见谅) |
|
|
|
| | | | | | | | | | | | | 我自己的看法,我们所谈论的开关电源是一个病态的非线性系统,但是在补偿时,我们只是在对小信号进行调节,而当对这个系统进行小信号线性化之后(在理论建模设计的时候,是这样操作的,可是实际电路还是一个非线性系统,这个又能否用经典pid来观察?),是可以用线性系统的补偿来做的(即经典控制理论就可以用了)。 |
|
|
| | | | | | | 上面的是讨论的主要内容,下面会逐个来对齐分析和解决。 |
|
|
| | | | | | | 1,病态非线性,好词啊,这么说你见过非病态的线性系统喽?经典控制理论只是研究稳定性的问题,即使是所谓的最优,也依然是个静态指标,与你所关心的小信号动态特性风马牛不相及!而且还是非病态的线性系统,与实际情况相差深远!从理论上来说,八竿子打不着啊!然而本大师的看法是,只要小信号线性电路非病态的稳定,则实际的非线性电路就会稳定,或稳定与不稳定各占一半的可能性。而且作为好的动态响应过程,接近一阶或二阶总是好的,因为到目前为止,伟光正的控制理论从不谈论3阶的问题,所以人们就都想当然地用二阶的20db穿越60度的相位裕量来设计了,本大师的看法是可能对于高阶例如3阶系统,低的相位裕量例如30度以及-40db的穿越也可能有个无震荡的快速的相应过程,除非有人能从理论上证明不是这样,就像二阶电路被研究的那么仔细一样,连国产教科书都有,可见其普及的程度,令人发指啊!值得庆幸的是,一元三次方程式有解析解的,那么教书育人的国产教科书作者们就有责任,像推倒二阶电路一样地推到3阶电路,给出类似2阶的解析结果,以令人感到其作者也是个能做学问的人,好不好呢?嗯,虽然如此,应该是无人响应才合情合理!从不指望所谓的叫售们能够推到4阶系统,因为一元四次方程没有解析解。
如果无人作3阶系统,那么这里就涉及一个问题,所谓的专家交售们,真的明白吗?很可能与你一样的一知半解,在这个严肃的问题上吧?
其实,这个问题,你无须太认真,认真你就书啦!事实上,在任何一个现实的控制回路或电源回路里,根本没有人用理论来解决,因为理论相对于实际问题,理论只相当于一个小学生,不知道的太多了,凑试直道满意为止!
这是本大师的不太成熟看法,楼下怎么看?
|
|
|
| | | | | | | | | 谢谢大师回复。上面的十只我突然想起来,这么一些问题。
问题如下:如何根据示波器的波形来判断补偿是否合适?根据示波器的波形来判断补偿合适这样是否合理?
我的理解是(不一定对,错了,还望大师指点,谢谢!):看到的只是时域的波形,这个我们设计的时候是根绝频域来设计的(即有了开环传递函数,来推得闭环所需的补偿网络)。那么这个时域的波形如何反映出其对应的时域情况?当然要是有环路分析仪,也没有必要费这么大劲,直接测得开环bode图,然后在根据所测的波形来设计即可,但是i若没有这个环路分析仪,又改如何? |
|
|
| | | | | | | | | | | 难啊!你只是在一种条件下测试,例如一定的输入电压,和一定的负责情况下,而且这里都假设所有器件都是理想的。然而对于负载扰动,这就是个非线性电路了,因为只有在固定输入和负载的情况下,才是个认为的线性电路,然而负载的小幅度变化可以近似认为是线性电路。但是实际电路,在大的负载变化时,可以是稳定的,也可能不是。所以仅此一点,你就知道现实情况是复杂的,很难说负载会以一种固定的方式变化。所以办法就是,估计最大最小负载,在这两种情况下,保证设计参数,都可以使电路稳定,这就是个没有办法的办法了。
观察方法,当然示波器最为直观,调节过程一目了然!调试参事,令响应过程满意为止!应该就是这样的了。
本大师很清楚你的问题,就是拚域的补偿与输出的波形对应的问题,这个问题本大师刚才已经说过了,事实上本大师在这个坛子已经有过多次说明!估计认同或看懂的没几个!
|
|
|
| | | | | | | | | | | | | 谢谢,那么你所说的在最大负载和最小负载的变化情况下,或者说低压和高压输入的情况下,输出电压波形是稳定的即可。这个稳定具体如何界定?响应过程满意为止,你说的意思是不是就是输出电压波形它的超调,稳态精度,调节时间,响应速度较好?
如果是,那系统是稳定的,那么假如你改变补偿电阻的依据来自哪里,是从频域的bode图来分析的,还是直接从时域的角度出发所改变的?其实有点绕,就是我们改变低频增益,使得稳态精度可以变好,从而输出电压更接近我们的预定值.而不是根据简单的PID来进行补偿的?
完了,不知道你明白我意思没有,有点绕了,希望大师能明白 |
|
|
| | | | | | | | | | | | | | | 很难兼顾最大最小负载的,所以稳定即可,超调振荡可以有,但最后要稳定,当然越小越好。
在波特图的小信号补偿中确定各个参数,用示波器细挑而已。PID可能有较明确的参数意义,但其他补偿就未必了。
|
|
|
| | | | | | | | | | | | | | | | | 我想问下直接的,就是数字PID那种方式的来进行对这个补偿调节,合理吗?可行吗?大师身经百战,还望给晚辈说说...... |
|
|
| | | | | | | | | | | | | | | | | | | 还真让你说着了!数字PID肯定没问题,合理和可行。如果开关频率是100k,那么PID的采样频率也是100k,输出控制占空比就可以了,和模拟式的没区别!
事实上III型补偿或更高的,离散化后,都可以数字化!
|
|
|
| | | | | | | | | | | | | | | | | | | | | 谢谢!恩恩,还有就是我用数字PID来调节这个补偿,这样也是可以的吧,可能只是如你所说,没有频域那个来的精准,不知对否? |
|
|
| | | | | | | | | | | | | | | | | | | | | | | 数字PID那种方式,我输出误差大了,我改变比例增益之类的.... |
|
|
| | | | | | | | | | | | | | | | | | | | | 我还是得再次确认下,你所说反馈用PID来调节是可行的,就是PID的每个参数物理含义都很明确的,其实这是我们在补偿里很乐意见到的。如果我用一个II型的补偿网络,我看输出电压的稳态精度不好,我觉得那个比例参数不够好,我要改那个参数,可是里面的那个电阻一改变,其实改变的是零极点,所以这个在实际的补偿网络,既然采用的II型这些频域特性已知的,就没有必要再去用PID这个粗调的方式了,还是老老实实按照频域零极点位置改变来调节的吧,这样对否? |
|
|
| | | | | | | | | | | | | | | | | | | | | | | 对!理论上来说,PID数字的和3842之类的调节没区别!但如果电流型的,就是一个串级控制,电流环是内环。电压环是外环。 |
|
|
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | 是大师对晚辈们的不倦指导啊,谢谢大师对晚辈们的帮助!这些问题自己好多都有结论和想法,可是毕竟实战不够,所以不敢确定,就是希望能遇到高人,能直接了当的说,你那个想法是对的,你那个做法是对的。才敢记忆到自己脑子里去,要不然若记忆一个错的,还没有搞明白,日后是要出大问题的。以后工作了,要是刚好犯了这些错误的经验主义的错误,老板是要拿刀砍人的...... |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 哪里,哪里,谈不上指导,一点自己的看法而已,不一定都对。
补偿的问题,偶的看法是没有一定之规,没有正确答案一说,还是多摸索实践吧!车到山前必有路,就是这么个道理,办法总是有的。
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 恩恩,但是大师能将这个整个宏观的东西理解如此透彻,真的很是强大。对于我们这些晚辈而言,最害怕的就是方向不对,以致于埋头拉车,说不定就掉阴沟了,你给我们指明方向这就是最大的帮助,至少细节我们还可以埋头苦干,因为方向是对的! |
|
|
|
| | | | | | | | | 我上面所说的那几个词,只是相对而言的,经典控制理论适合于线性系统,这个世界是没有绝对的线性系统。我说那个只是为了引出下面的一些不同,因为开关电源由于加了开关,所以这个已经不能用小信号直接进行分析,这也是为什么在saber中,不能用小信号交流分析来对开关电源直接进行频域的仿真,除非是进行建立了平均模型,这也就是为啥用tdsa那个东东来看的原因吧。因为在调试的时候,看到有人用经典控制理论中的PID理论对开关电源进行调试,我就想问这样的方式合不合适?根据在哪里? |
|
|
| | | | | | | | | | | 可以认为在采样点上,开关电源很是接近线性电路,这个当然是在固定输入和负载以及理想化的基础上。
而取平均值,就是获得采样点的方法,这是本大师的个人看法,信不信油腻!
|
|
|
|
| | | | | | | | | | | 是啊,积分乃万恶之源啊!然而这是对于控制对象模型难以获得的情况下,人们才不得不使用PID。
但是对于模型基本固定的开关电源来说,PID可以用,也可以用其他方法,反正就是提供零点以补偿极点,这个补偿可能是完全抵消式样的补偿,也可能是补偿特定极点的零点补偿,例如-40db穿越了,就要用一个零点来补偿,原理就是这样了。如果有足够多而好的补偿电路,那么问题在固定参事的情况下,总会有良好的解决方式。
没有办法的办法采用PID,但响应过程未必最好,如果零点完全补偿极点,当然最好,至少也是因为PID可以提供一个零点,而输出电容本身就有一个,而且频率还基本固定,所以此时的PID可以起到展宽闭环带宽之作用。
对于开关电源,积分作用不像其他专业那样敏感,毕竟模型是基本固定的,在一定条件下!
|
|
|
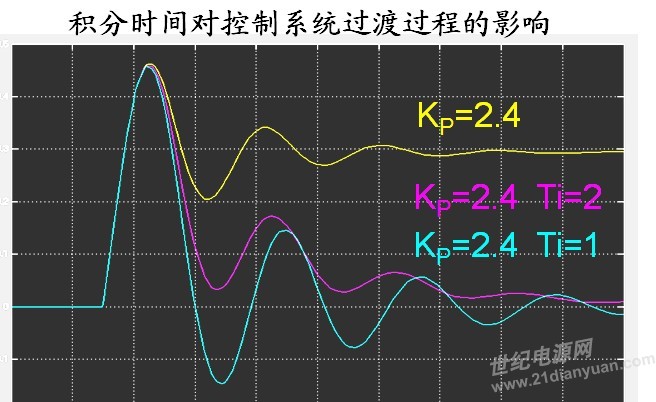
| | | | | | | | | | | | | 谢谢大师!所以说,我们在设计好了一个补偿网络之后,调试阶段,我们觉得这个输出之类的波形不好(稳态性不好等等),我们改变补偿,还是主要依据的开环传递函数的模型,譬如说,穿越频率点,低频增益够不够,高频衰减好不好,这些再转化为示波器上看到的时域很好的波形呢?就是时域波形------频域的bode图-------改变这个bode图------时域变好? |
|
|
| | | | | | | | | | | | | | | 嗯,有道理!
的确有提高低频增益,高频衰减的说法!但是,这都是客观存在的现象,而且PID对于高频衰减未必有作用吧,II型补偿可能衰减高频。
穿越频率可以近似看作闭环的带宽,越大响应就越快,但未必不稳定,即振荡和超调可以很小。
不同的低频增益,转折频率,就有不同的时域相应过程,谁知道哪个好那个坏呢?可能会有一些经验数据吧?
|
|
|
| | | | | | | | | | | | | | | | | 恩恩,一般也就是I II III 这三种补偿吧,但是III必然是最合适的,但是由于这个主电路的不确定因素,所以用这个III会把问题弄得更复杂,所以我一般不怎么用。根据想要的-主电路的=补偿的。看来这个还是需要在调试的时候对这个电路的深入理解,对输出波形的准确判断,才能配合处一个好的补偿网络。再次感谢大师! |
|
|
| | | | | | | | | | | | | 刚没仔细看,明白大师的意思了。是不是你的意思,对于我们所研究的对象,如果其模型是确定的,就如开关电源一些开环bode图是可知的,对于一些其他的大型的(如电机系统)模型不可知,所以只能用PID来进行调节,但是开关电源元大多数知道其建模的模型,所以就直接用更为精准的频域分析,补偿就是最佳的手段,对吗? |
|
|
|
| | | | | | | | | | | | | | | | | 万分感谢!这是一只困扰我的问题,看书还是没看明白.悲剧,看来智商不够........... |
|
|
| | | | | | | | | | | | | | | | | 大师,你在实战中时如何辨别这个补偿是否合适的?你一般根据那些波形来判断的?输出电压波形,输入电流波形?你说的输出稳定,在示波器上,我们经常看到的是在某个时间区间里面的波形,能看到的就是纹波大小,稳不稳定(如电压不是直的,而是往上涨,或者下降,当然这个能说明反馈没有起作用,如果已经比较精细了,那还怎么调,希望达到一个近乎最佳的?),就是这个吗?我能否把开机瞬间的波形抓取出来(包括电压上升过程,稳定过程,来看超调,调节时间之类的,这个可以吗?依据是什么?),来判断这个补偿的好坏呢? |
|
|
| | | | | | | | | | | | | | | | | | | 就是输出电压的稳定问题,其他的不重要.
对于负载扰动,可以用方波变化的电子负载嘛,这样看波形就可以了。看的应该是包络,频率远低于开关频率。
关键看超调和振荡,如果不稳定的振荡,肯定不行。想更小的超调,可能要提高穿越频率,但可能会引起更大的振荡。能保证所有情况下,满意,主要是超调可能会是个波纹的指标。
负载变化比较随机,输入电压的变化一般不太大,因为频率补偿本质上就是针对输入变化的,所以问题不大,也可以用示波器看到阶跃响应过程。
|
|
|
| | | | | | | | | | | | | | | | | | | | | 恩恩,对,应该是包络,还有就是那个100hz或者120hz的包络线。这个也只有靠反馈来压下来了..... |
|
|
| | | | | | | | | | | | | | | | | | | | | | | 不应该有100hz的包络,因为穿越频率即使1k,对于100hz也应该问题不大,10k就更没问题。
或者说100hz的开环放大倍数应该足够大,例如怎么也的大于40db为好。
如果不是这样,那就是补偿不好,出现的输出振荡!
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | 恩恩,是不应该看到的,我说的是如果出现了,就说明这个补偿网络有问题,因为这个100hz的应该没补偿作用使他消失的 |
|
|
|
| | | | | | | | | | | | | 抓紧时间,大师要走了。呵呵,我后面那个问题,就是在高频的情况下,由于一些分布参数,可能改变了我们理论上已经推证的一些开关电源开环的模型,如穿越点变了,低频增益也可能变了,那么我们在实际设计的时候,依据这个推证的来设计,是在一个理想的情况下设计出来的补偿,那么实际中由于其变了,所以补偿也就不合适了。这个时候,主电路开环模型已经变成呢个一个黑盒子了,那么在实际调试中,我就只能来摸索了,只能凑试了,大师还有别的方法吗? |
|
|
| | | | | | | | | | | | | | | 恐怕你得穷尽可能的各种情况,力图保证所有情况下输出的稳定问题!
好在PID之类的还有一定的鲁棒性能,可以适应一定的不可能测变化。
|
|
|
|
| | | | | | | | | | | | | | | | | 嗯,应该也可以吧相位裕量留大点,以防那些该死的可变因素影响了系统的稳定性,不过这个对动态性能有损伤......终归到一句话,还是要实战调试,估计天天实验,再天天总结,能得出个好结论来。 |
|
|
| | | | | | | | | | | | | | | | | | | 和其他专业有所不同,开关电源主要还是负载扰动的问题,然而值得庆幸的是,即使输入变化不稳定,负载扰动依然可以稳定。
总的来说,作为保守的补偿参数,应该是穿越频率经可能小一些为好,这样适应性能会更好一些,毕竟如此相位裕量是比较大一些的。
|
|
|
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | 能具体到电容电阻吗,给我们这些初学者提供点方法,万分感谢 |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | 有的,你需要知道主电路的传递函数的表达式,这是其一。第二点:你采用的是几型的补偿网络,这里面说到底就是分子分母上面的零极点的位置,这个零极点也就是你补偿网络曲线的拐点,这些拐点对应的值的大小是可以确定的,就是零极点的值。这是与你补偿网络的电阻电容直接相关的,所以你查哈这些补偿网络的转折点的值,适当调节你的阻容值即可,但是一点要记住,你补偿的网络要与主电路结合后变成那个理想的曲线。 |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | 常见的电路拓扑结构的主电路传递函数,前辈们大多都已经推算出来了。张兴柱老师给出了很多,我们就不需要自己再去搞了。一般不确定的需要自己来测得或者查找的,就是输出电容的ESR,这其实也是客观的东西。自控里面,已经对我们想要的得到的理想幅频曲线给出来了,想想.............低频段,中频段,高频段那个三句真言,足矣。我们大多数时候只是懒得去演算,其实没事的时候可以做一些这样的电路的文档,需要的时候调出来,以逸待劳,有不对的再去修改一下即可! |
|
|
|
|





 收藏
收藏 分享
分享

 津公网安备 12010402000296号
津公网安备 12010402000296号