|
|  |  | | | | | 恩,前提CCM连续电流模式,之前都不知道斜坡补偿是怎么回事,看了N多的文章不思其解。许多篇文章提到到50%占空比的时候要加斜坡补偿,至于为什么要加,没有一篇文章说的请。
偶然翻了下[Ron lenK]实用开关电源设计,书里面的讲述很清晰易懂。 |
|
|
|
| | | | | | | | | | | 蓝天兄总是神龙见首不见尾,东冒一下西冒一下,既然来了也不谈谈  |
|
|
|
| | | | |  | | | | | | | | | | 就是因为资料多,鱼龙混杂呢,期待蓝天兄的画龙点睛啊~  |
|
|
| | | | | | | | | | | | | | | | | /*********** 广告已删除 ***********/ |
|
|
|
|
| | | | | | | | | 知识点需要多总结总结,这样才记得牢,不会搞混。
补充一点:
说到斜坡补偿, 是针对峰值电流控制说的。
平均电流控制不需要斜坡补偿,但存在斜率匹配问题。 |
|
|
| | | | | | | | | | | 这下问题又来了: 请教“斜率匹配” 是怎么一回事? |
|
|
| | | | | | | | | | | | | 要画图说明,不方便。
推荐看张卫平的那本建模书,里面有详细说明。 |
|
|
|
| | | | | | | | | | | | | 楼主大哥我可能太愚钝了,没怎么整明白,还请帮忙释疑:
1.起因中斜波补偿的定义是不是应该改成次谐波补偿的定义啊
2.我现在有一款充电器CCM模式,DMAX最大0.58这样有问题吗(芯片有斜波补偿)
3.文中多出提到电感电流,这个电感电流是指那部分啊
拜托了! |
|
|
| | | | | | | | | | | | | | | 回答:
1. 对于“次谐波补偿” 这个概念的定义我不太理解,
2. 我不知道你充电器的电路拓扑,正激还是反激还是推挽。
3 请参阅PC817 跟TL431 配合的经典电路去理解。 |
|
|
| | | | | | | | | | | | | | | | | 是反激的,我看了下PCB17和TL431还是不太明白,帮忙点拨下, |
|
|
| | | | | | | | | | | | | | | | | | | 斜坡补偿,是坡不是波。
电感电流,对于你说的反激来讲,可以看变压器原边电流或者副边电流,它们有个匝比关系,本质一样的。 |
|
|
| | | | | | | | | | | | | | | | | | | | | 谢谢指正,帅哥能否传个电流上迭加斜坡信号的图片看看,弄了这么长时间真不知道它是怎么一回事 |
|
|
|
|
| | | | | | | | | | |  | | | | | | | | | | | | | | xiaoliangyl 高级工程师您好,我看了您的《电流控制技术与斜坡补偿》文档后有几处不明想向您请教一下,

1,请问这个电感是怎么取的,它是变压器的原边电感量,还是二次侧的电感量,比如正激有是那里的,是整流管后面的输出电感吗?
2,Vse是芯片的锯齿波振荡频率的峰峰值吗?比如我 用SG3525的驱动芯片,资料说明里讲的是3.9V.到0.9V的锯齿波振荡电压,那么Vse取3.9V吗?
3,Rf*Ri*Gca=17.34是怎么计算的? |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | 请问这句话怎么理解? from:电流控制技术与斜坡补偿 |
|
|
|
| | | | | | | | | | | 大侠能不能给些平均电流控制的参考资料看看,我正在学习这方面的内容。貌似平均电流控制不像峰值电流控制这么形象好理解,所以我正发愁呢。
先谢谢了。
|
|
|
| | | | | | | | | .......下一个周期的初始电流变大了,
接下来的这个周期里,电感电流很快就上升到参考点,导通时间短,占空比窄,下一个周期电流的初始值太小,又使得占空比再一次超过50%,如此循环,电流就 一个周期过大和过小 了. 很清楚啊! |
|
|
| | | | | | | | | | | 为什么一定是50%呢?
40%,45%就一定不会振荡了么?
不懂...... |
|
|
| | | | | | | | | | | | | 对一个稳定的系统来说,电感的秒伏数是相同的,V[sub]on [/sub]x t[sub]on[/sub] =V[sub]off[/sub] X t[sub]off ;[/sub]
[sub]电感电流的上升时间要等于电感电流的下降时间。[/sub]
反馈电路,讲电感电流大小转化成电压,就好比一个厨子火候没掌握好,尝第一口发现汤淡了,
于是加盐(增大占空比),加了盐之后又发现汤太闲了,于是又加盐。如此反复。我们要做到的就是,使反馈的量能使汤变得不咸不淡,口感适中。 |
|
|
| | | | | | | | | | | | | | | 这个比喻感觉怪怪的,占空比是我们设定的,而反馈是自动调整的过程,
再说伏秒数相等是任何一种拓扑的前提条件, |
|
|
|
| | | | | | | | | | | | | | | | | | | 反馈改变的是占空比没错,但这个过程是自动满足的,按你那加盐的意思好象是我们控制占空比的意思 |
|
|
| | | | | | | | | | | | | | | | | 所以说设计占空比的时候,很多工程师都会设计D=0.4之类的,就是说小于0.5。如果你的D在最恶劣的情况小于0.5,就不会出现这个问题。 |
|
|
| | | | | | | | | | | | | | | | | | | 为什么D会大于0.5啊,大于0.5就会出现不稳定吗? |
|
|
| | | | | | | | | | | | | | | | | | | | | 充电太慢或起点低了、误差(电流限制线)电平定位过高。 |
|
|
| | | | | | | | | | | | | | | [size=13.63636302947998px] “对一个稳定的系统来说,电感的秒伏数是相同的,V[sub]on [/sub]x t[sub]on[/sub] =V[sub]off[/sub] X t[sub]off ;[/sub]
[size=13.63636302947998px] 电感电流的上升时间要等于电感电流的下降时间。”
[size=13.63636302947998px]
[size=13.63636302947998px] 这句话怎么理解呢?
|
|
|
| | | | | | | | | | | | | | | jafck版主,你后面那句话是不是说错了,加了盐发现汤咸了,后面怎么还加盐呢?那岂不是更咸吗?  不应该是加水冲淡到不咸不淡才对吗?  |
|
|
| | | | | | | | | | | | | 几何作图能清楚地看到“扰动”的变化随占空比的关系 ~ |
|
|
|
|
| | | | | | | | | | | | | | |
电感的时间常数是固定的,而从电流低不见底的现像表明这是 DCM 的,占空比不可能接近零或一。 |
|
|
| | | | | | | | | | | | | | | | | 汗啊,把C跟D记反了;另外,电感不可调这点可该没错,能影响充放速度只有供电状况,而影响占空比的就只有充放速度及电流限制线高度了。 |
|
|
| | | | | | | | | | | | | | | | | 不明白啊~.电感电流斜率不是和加在电感上的电压有关系吗 |
|
|
| | | | | | | | | | | | | | | | | | | 对啊,看 88 和 97 楼的图,m1 是充电的,受供电的影响,m2 是放电的,不管那种布局,电感的电都是往负载放,故影响 m2 的是负载(这我在先前讲错了);所以,工作频率、电感参数、供电状况及电流限制线的设置,是要配套的。 |
|
|
|
|
|
|
|
|
|
| | | | | Vo是「不变」的,负载电流 跟电感电流 好像是不太相关的(不是有大电容,就是不同路),那么…。 |
|
|
| | YTDFWANGWEI- 积分:109871
- |
- 主题:142
- |
- 帖子:45924
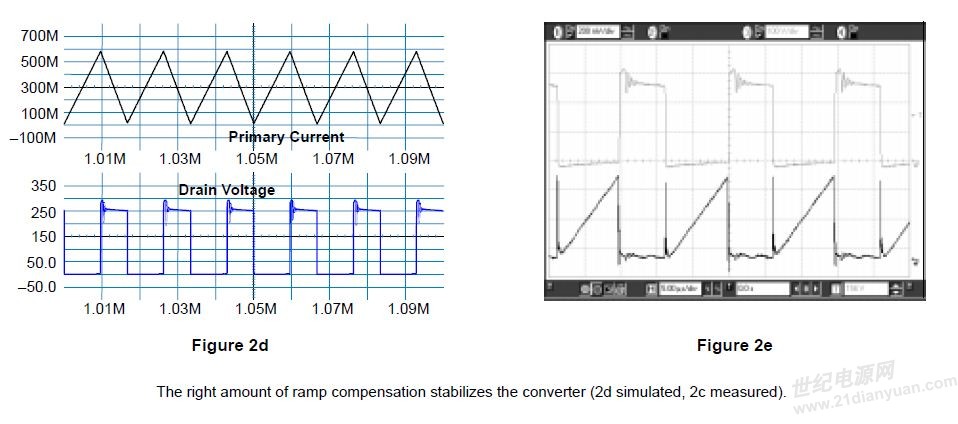
积分:109871 版主 | | | 如果占空比超过50%,电感电流的上升时间就大于整个周期的50%,那么电流下降时间就小于一个周期的50%’。在较短的时间内,电流还没有来得及回到静态初始值,下一个周期接着又开始了。下一个周期的初始电流变大了。
加了斜坡补偿后,这个现象应该仍然存在吧? |
|
|
| | | | | | | 只要占空比超过50%,这个现在就肯定存在,加斜坡补偿是为了使扰动电流在接下来的周期越来越小,保持系统稳定 |
|
|
|
| | | | | YTDFWANGWEI- 积分:109871
- |
- 主题:142
- |
- 帖子:45924
积分:109871 版主 | | | | | | 好象我记得CMG提过,其实理论上占空比大于38%就需要斜坡补偿了。(但愿没记错) |
|
|
| | | | | | | | | | | | | 我记得也有看过,虽不是很认同,但也是有必要的,一般来说输入我们按最小输入电压得出的理论占空比要偏小10%左右,而且由于电解容量误差,整流器件压降误差等其它因数,在占空比大于40%就需要斜坡补偿了 |
|
|
|
|
|
|
| | | | | | | | | 1/。如果不加补偿呢?
-- -系统仍然是稳定的(不过要出现次谐波震荡,同意这样说否?)
2。你20楼:再说伏秒数相等是任何一种拓扑的前提条件。
----稳定的系统:单个周期内,伏秒数可以不相等。 |
|
|
| | | | | | | | | | | 1我不同意这种说法
2伏秒数相等是任何一种拓扑的前提条件,这句话我记得在《精通开关电源》有相同的描述 |
|
|
| | | | | | | | | | | | | 这个陶显芳的很多文章也是围绕秒伏数相等来说的,我记得推导这个秒伏数为什么相等,还是有个推导依据的,忘了是那本书上讲的了。好像是赵修科老师的磁性元器件手册一书 |
|
|
| | | | | | | | | | | | | 1。你再研究下没有斜坡补偿的 电感波形图 。。。
2。实际电路中,去掉斜坡补偿(或者减弱补偿程度)难道就不能工作?
希望王斑竹也来说一说 ~ |
|
|
| | | | | | | YTDFWANGWEI- 积分:109871
- |
- 主题:142
- |
- 帖子:45924
积分:109871 版主 | | | | | | | | 你还是饶了我吧,你要是问我,发生次谐波震荡了咋办,我会告诉你,加个斜坡补偿试试。可你问我为什么要加,我就只能  了。  |
|
|
| | | | | | | | | | | | | | | | | 对呀,实际中观察到次谐波震荡并不稀罕 ~
既然有次谐波震荡说明了三个问题:
1。工作在CCM 并且duty大于50%
2。系统并没有发生“扰动” 越来越大(导致系统崩溃)。
3。单周期内,电感的伏秒数不相等 。 |
|
|
| | | | | | | | | | | | | | | 回答2:即使不加补偿应该也能工作,但是会出现超调,引起振荡。假设我们设计要求里规定是100mS内达到稳定,那么在去掉斜坡补偿后,可能需要若干倍时间才能达到稳定的状态,运气不好的话,恐怕会永久振荡下去,造成电压不稳,电容发热严重。 |
|
|
| | | | | | | | | | | | | | | | | 所谓的「分岔」,指的是否就这情况?
另外,那个『负载电流』参考值究竟咋来的,
是不是从 负荷→纹波幅度→误差电压 这样来的呢?
果真如此,不就跟以电流环「治未变」的本意不符了吗? |
|
|
| | | | | | | | | | | 要不换一中说法
dION=dIOF恒等于dI
是任何一种拓扑的前提条件
这样蓝天兄认同不 |
|
|
| | | | | | | | | | | 关于第一个问题:我反问蓝天兄,你是不是认为斜坡补偿就是针对次谐波震荡? |
|
|
| | | | | | | | | | | | | xiaoliangyl bluesky 两位兄弟,能否图文说下你们的观点啊;
有可能你们说的是同一回事,表达出来不一样而已。 |
|
|
|
|
| | | | | | | | | | | | | 从理论上说,如果占空比大于50%,不加斜坡补偿系统是无法稳定的。“扰动”会越来越大。但是,实际中能看到次谐波震荡的。为什么系统不崩溃?这点也让我迷惑 ~ |
|
|
| | | | | | | | | | | | | | | 我个人认为,扰动虽然会增大,但一般IC内部电路和我们加的RC滤波应该能起到一定作用,所以在短时间内系统没崩溃,不知蓝天兄赞同不? |
|
|
| | | | | | | | | | | | | | | | | 回家的路上想了下:duty大于50%导致扰动越来越大的分析前提是假设Vc(电压环的输出)不变,当扰动越来越大的时候,duty被强制受缩,下个周期被强制拉伸,导致能量的传递变的不平衡了(猜想),这个时候被电压反馈环“察觉”,调整了Vc。从新找到某一平衡状态,因此可以推想:电压环的存在,让“扰动”不可能无限地膨胀下去,PWM 以次谐波震荡的形式存在 ,由此可以得到一种看法:斜坡补偿,所能解决的也就是次谐波震荡,对系统的稳定似乎没有本质上的贡献 ~
个人猜想 ~ |
|
|
| | | | | | | | | | | | | | | | | | | 我要是会仿真就好了:
稳定状态下(不带斜坡补偿):
1。记录电压反馈环的输出Vc
2。用一个电压源(=Vc)代替Vc,并断开反馈环
3。给一个扰动
4。观察是否能仍然稳定 ~ |
|
|
| | | | | | | | | | | | | | | | | | | | | 我看看能否仿一下,不过仿真我也是半桶水 
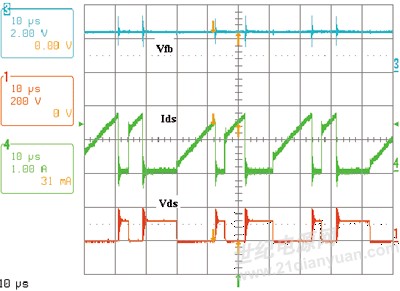
但我以前碰到个实际情况,用英飞凌的方案,没加补偿当占空比大于50%时有次斜波振荡,还有FB脚的波形在示波器上显示的是一条跳动的不规则曲线,有加补偿FB脚的波形是一条相对规则的锯齿波,短时间工作没什么问题,长时间就难说了 |
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | 到现在我还不知道次谐波振荡是什么波形  ,哪位大哥帮忙传个看看啊 |
|
|
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 只是那时候照的时候没照好而已,主要看左边,典型的大小波,其它都正常 |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 不知道,吴兄有没有这方面的资料:
(CCM ,duty大于50%)在没有斜坡补偿的情况下,电压反馈环是如何维稳工作的? |
|
|
| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | 我也在找,仿真也不好解决,我认为芯片里面好几个模块是数字电路,抗干扰能力应该很强,问下熟悉芯片内部电路的人,也许能迎刃而解 |
|
|
|
|
| | | | | | | | | YTDFWANGWEI- 积分:109871
- |
- 主题:142
- |
- 帖子:45924
积分:109871 版主 | | | | | | | | | | 采用斜坡补偿,真正的作用在于即使存在一定的元件参数误差和负载发生一定的变化的时候,系统仍能稳定工作。(摘自实用开关电源设计)这话什么意思? |
|
|
| | | | | | | | | | | | | | | | | | | | | 王工的问话让我脸红发烧 ~
从字面上的理解是:斜坡补偿对环路的稳定性有作用 ~
需要再去研读张卫平的那本书(一直说看,就是没有看这节)。 |
|
|
| | | | | | | | | | | | | | | | | | | | | 这里有个朴素的理解:
1。没有斜坡补偿,为了维持稳定电压环必将“疲”于奔命 ~
2。如果电压环的“鲁棒性”不好(通俗地说:本来体质就差),一点风吹,就抵抗不住了。
斜坡补偿是给系统披了件“保暖”外衣 ~ |
|
|
|
|
|
|
| | | | | | | 问题是:
即使没有斜坡补偿,且PWM出现了次谐波震荡,但系统并没有崩溃。该如何解释?
能否将这篇文档共享下?谢谢 ~ |
|
|
| | | | | | | | | 系统没有崩溃,是反溃环在调整!前面看出来,你是知道这个的。
没有斜坡补偿,反溃环要把它调整回来会更难一点更慢一点。 |
|
|
|
| | | | | | | | | | | | | 就只有这两个页面!当做是我对那篇文章的理解。
现在都把斜坡补偿做到IC里面了,我们没有必要操心。 |
|
|
|
|
| | | | | | | | | 都发生次谐波震荡了,还不叫崩溃吗?
应该是怎样才算崩溃呢? |
|
|
| | | | | | | | | | | 呵呵, 兄台来了 ~
我理解的“崩溃”就是电源系统最后不能工作了 ~
(假定电压环输出保持不变)电流环导致duty=100% ,下个周期duty=0
电感说不定已经饱和了。
现实的情况中,一定程度的次谐波震荡是可以存在的,系统对外界负载的输出也能保持正常。70楼的波形就是实际中PWM的波形(在减弱斜坡补偿后就能观察到) |
|
|
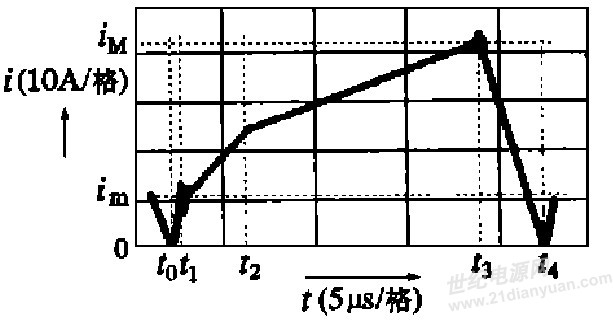
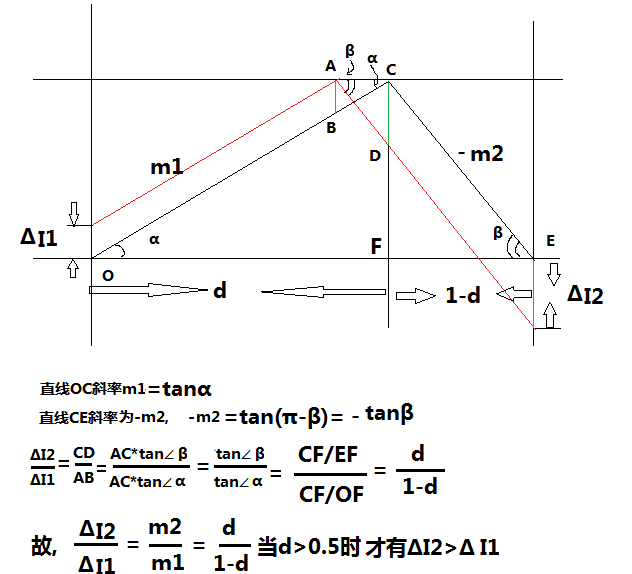
| | | | | | | 说是在的,我看不懂的就是这个图,M1 M2 |
|
|
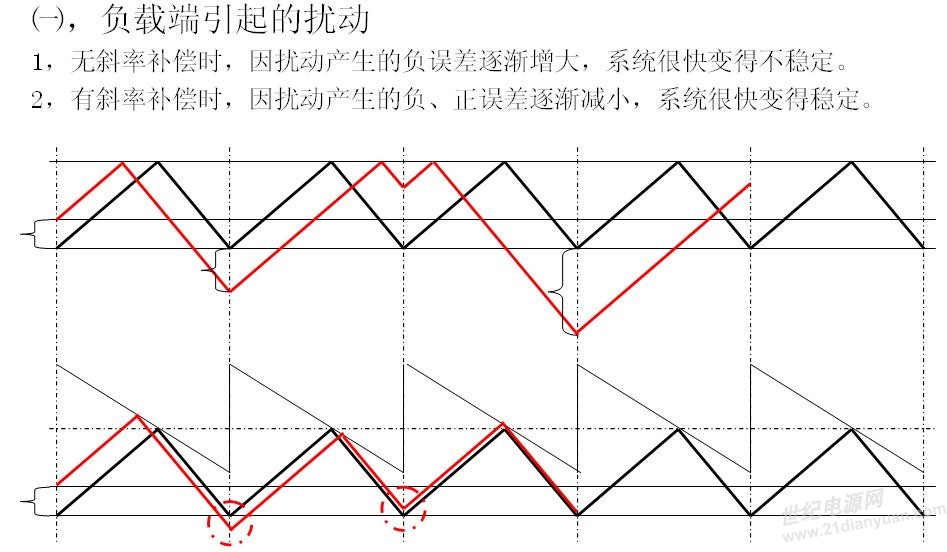
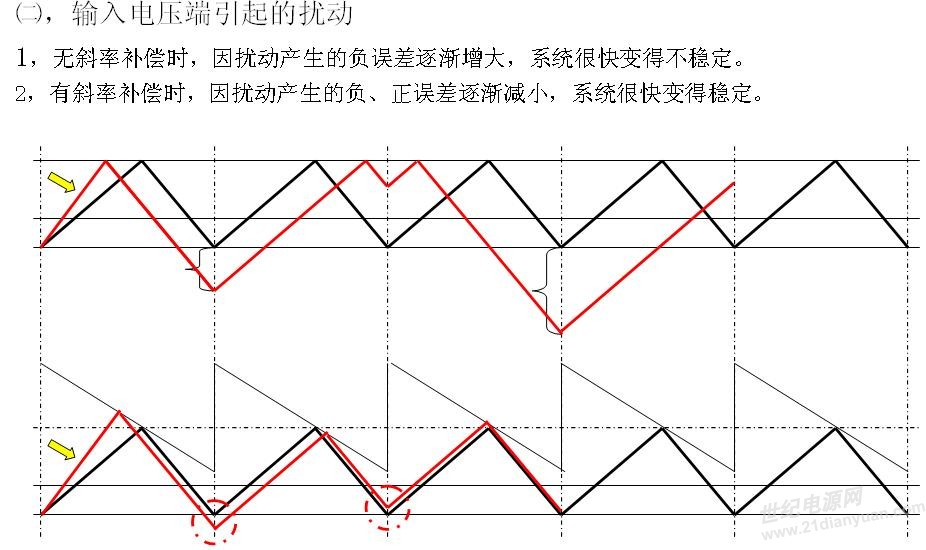
| | | | | | | | | 看作是非隔离Buck电感!开关频率固定,电感充电、放电时间和一定。当系统受到扰动后,充电、放电时间发生变动。
黑色线波形,表示稳定状态;
1图红色线波形,表示受干扰后充电、放电时间发生变动(占空比变了),从而偏差越来越大;
2图红色线波形,表示受干扰后充电、放电时间发生变动(占空比变了),但由于斜坡补偿(尖角向下的三角形),从而偏差越来越小。 |
|
|
| | | | | | | | | | | 2图红色线波形,在第三个周期就可以与正常情况下的黑色线波形重合了。
1图红色线波形,没有与黑色线波形重合(偏差越来越大)了!
反馈是来不及做这么快调整的! |
|
|
| | | | YTDFWANGWEI- 积分:109871
- |
- 主题:142
- |
- 帖子:45924
积分:109871 版主 | | | | | 一个是补偿的斜率,一个是电感电流的斜率,只有当补偿的斜率达到电感电流斜率的的一定比值后,才对于扰动信号起缩小作用,记得好象是这个意思。 |
|
|
|
| | | | | | | “反馈,是来不及这么快做调整的!
1图红色线波形,没有与黑色线波形重合(偏差越来越大)了!
2图红色线波形,在第三个周期就可以与正常情况下的黑色线波形重合了。”
从黑线可知,此乃 DCM(因最小值还没见底),你那峰值(水平虚线)是有限制的,否则起始值就不一致,而斜坡中间点也 应该等于原峰值,是不是这样? |
|
|
| | | | | | | 斜坡波列高度就是输出电压误差,斜坡坡度则关乎负载轻重,
斜坡电平与占空比都跟“分岔”有关,占空比最大不过是 1,且可藉斜补摆平,但斜坡电平却可以是无限量的,太大了,系统不单“分岔”,甚至会混沌! |
|
|
| | | | | | | | | 1图最上一根直线,是反馈形成的“电流限制线”。
2图虚线,还是那根反馈形成的“电流限制线”。但加了斜坡补偿后,真正的“电流限制线”是锯齿波。 |
|
|
| | | | | | | | | | | 反馈形成的“电流限制线”,一般要经过十几个周期的时间,才能“拨乱反正”。
而加了斜坡补偿的锯齿波“电流限制线”是逐周期的,每个周期都在“拨乱反正”。 |
|
|
| | | | | | | | | | | | | 说的很形象 ~
如果电压环响应“慢了”,有效的“电流限制线”不能及时建立,电流环已经崩溃了(扰动经过十几个周期的时间 ,已经膨胀地非常大)~ |
|
|
| | | | | | | | | | | | | 水平恒定的电压环反馈形成的“电流限制线”,是不能“拨乱反正”的 ~
电压环不能消除次谐波震荡 ~ |
|
|
|
| | | | | | | | | | | | | | | | | 可以肯定地说:
没有斜坡补偿的情况下,电压反馈环的输出,不可能是保持水平恒定的 ,这也是49楼的原因 。(个人浅见 ~) |
|
|
| | | | | | | | | | | | | | | | | | | 分析问题,总要分清主要矛盾、次要矛盾,抓住主要矛盾就好了!
分析斜坡补偿的时候,总要先假定一切都是正常的:输入恒定(不是大电容,是理想电压源),负载恒定。绝对不是现实中的反激,因大电容电压脉动而占空比渐大渐小不停地发生变化。此时,反馈电压就是恒定的了!
第二,你必须有这样的观念:反馈环起作用,一般经历三五个周期甚至10个周期。
否则,分析和理解斜坡补偿问题,只会是满头雾水,无法理清头绪。
示意图很明确,导通时间一忽大,再忽小,第三次导通时间就100%了。要靠反馈环去调整,黄花菜都凉了! |
|
|
|
|
| | | | | 电压环是线性弄的,压流二环应该是级联而不是并联,
你这里检测的是电感电流,负载电流 跟电感电流 好像是不太相关的(不是有大电容,就是不同路)啊。
|
|
|
| | | | | | | 可以的话,大家可以上个原理图实例,希望能具体的讲讲。 |
|
|
|
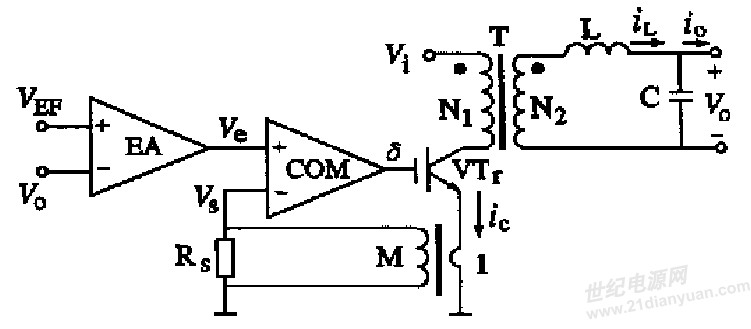
| | | | | | | | | | | 左图有 PSR 的影子,而右图就是我老说的『负载电流 跟电感电流 好像不太相关』的情况。 |
|
|
| | | | | | | | | | | | | 不是很理解你说的。
PSR是什么意思?
『负载电流 跟电感电流 好像不太相关』——请解释下。
|
|
|
| | | | | | | | | | | | | | | 首先,以我理解,弧焊是种 平时开路、焊接时 先短路后恒流 这样的模式,其次,你那变压器这么设置,效果是 正激或逆变的,那意味着当 Vs 增加时,Ve 也同时减小(反激则是当 VTr 关断时才减小的);当 VTr 关断,Vs 就立即消失,但 Ve 却不一定,这就要让 COM 的开通 由时钟控制(Vs 只用来关断)才对吧。 |
|
|
| | | | | | | | | | | | | | | 实际上,只要监测 电源至输出平波电容 这路段的电流,就可减少电源波动 对输出的影响,但真正的负载电流是 由电容至负载的,这路段没受监测,系统无法在电容刚要放电时立即支援补给。 |
|
|
|
|
|
| | | | | | | | | | | | | | | 不好意思,我搞错了,在主变压器 增设独立绕组採样 的才是 PSR,不过我又发现,那 N2 部份其实已起着跟 PSR 类似的作用吧,负载加个 N3 来带不就成了吗;至于 97楼 右图的负载电流问题,请看小弟在 101楼 的解释。 |
|
|
|
|
|
|
|
| | | | | 这么好的文章,这个必须顶,斜坡补偿在控制环路中用的相当普遍 |
|
|
|
|
| | | | | | 给楼主推荐个不错的技术网站,德州仪器在线技术支持社区,www.deyisupport.com 里面不少超赞的技术资料,还有视频,据说有TI专家亲自回复问题,值得去看看。
PS:不是广告哦,只是看见好东西大家分享。
|
|
|
|
|
| | | | | 电流限制线 Ve 只会是正值,零或负时电流环就不动了;Vs 则反映磁芯状态,故限制线不可订得过高,以免电感饱和。 |
|
|
|
|
| | | | | | | Vref 才是基准,Ve 或 Vs 之类就是 电流限制线,会权变的,只能称为 参考电压。 |
|
|
|
|
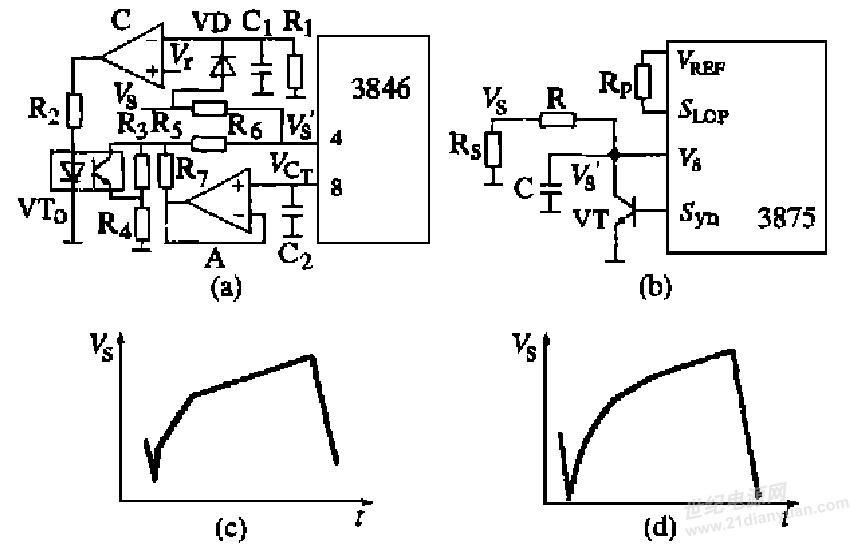
| | | | | | | 我还不晓得这斜坡补偿应该放在431身上还是芯片身上,能不能搞一个不用自动控制理论计算,用示波器看得出的波形讲算方法?因为相同的PCB和原理图,仅仅换了不同的变压器就不一样了.
谢谢 |
|
|
|
|
| | | | | | | | | | | | | 也不能这么说,需要补偿的芯片很多,多是集中用在峰值电流模式PWM芯片上。 |
|
|
|
|
|
|
|
|
|
|
|
| | | | | 楼主我想请教一个问题,在加入斜波补偿后,电感电流的峰值会低于外环的控制信号,那么这个会不会导致电感的电流无法满足电压环的控制要求? 是不是在加入斜波补偿后,电压环的控制信号也会相应的增加以保证输出电压问题? |
|
|
|
|
|
|
| | | | | [size=14.399999618530273px]好文章!有些疑惑:
[size=14.399999618530273px]1、观测到大小波,是否就一定意味着发生了次谐波振荡?或者说[size=14.399999618530273px]次谐波振荡现象就是大小波?
[size=14.399999618530273px]2、发生了次谐波振荡要进行斜坡补偿,但补偿后是否就没有了次谐波振荡了呢?或者说振荡更弱了或者是消除了?
[size=14.399999618530273px]
|
|
|
|
| | | | | 好东西,看来得重新拿起自动控制的书籍看了,干设计8年了不曾看过, |
|
|
|
|
|
| | | | | 电子产品项目供需群 191019994
欢迎大家加入 |
|
|
|
|
|
|
|
|
|
| | | | | 嗯,看来本大师一手创建的这个2流论坛里还是有点值得称赞的帖子的。
提出表扬!
谢谢大家!
你的次谐波震荡,敢于给出3.5个波形,就是比国内的所有关于次谐波震荡的2个波形,提高了一大步。
再次感谢大家!
|
|
|
| | | | | 但是阿但是,3.5个波形依然是不够,依然没有达到稳定状态。
不信就如图所示。
谢谢大家!

|
|
|
| | | | | | | 然而即使本大师给出的8个波形,依然还是不够。
依然没有达到最终的稳定状态。
在电感电流被扰动的情况下,其最终依然可以使稳定的。
但是最终会导致输出电压的降低,这是可能出现的。
因为某些周期里面,电感没有放电,而是一直被充电,而没有放电机会,这会导致输出电压的降低。
谢谢大家!
|
|
|
| | | | | | | 事实上,如果继续画出更多电感电流波形的话,依然就是右边黑色线所表示的了。
也就是说右边的黑色电感充电放电波形就是最终的稳定状态了。
假如输出电容的电压没有变化的话。
谢谢大家!
这说明,无论国外的RR博士,还是不论对错,胡子眉毛一把抓的国内书籍和资料。
都没有足够的能力看到如此简单的问题。
依然就是本大师所教导的那样。
从来就没有什么次谐波振荡。
谢谢大家!
|
|
|
| | | | | | | 这就是说无论国外的说法还是国内拿来主义的说法都仅仅是画了一个动态的暂态的没有稳定的所谓的“次谐波振荡”波形。
但是任何一个负责任的说法,说道震荡,总得画出能够震荡的波形吧?
显然所谓的“次谐波振荡”是不可能震荡的,你们所谓的震荡,紧紧就是看到了,一个电池给一个电容通过一个电阻充电,在电容电压没有稳定时候的一个刚开始充电的电压,你们就开始认为电容被充电,是“次谐波振荡”了。
真是太可笑了。
谢谢大家!
|
|
|
| | | | | | | 首先这里没有震荡,更没有次谐波振荡。
谢谢大家1
其次虽然电感电流的平均值在扰动的作用下,改变了,但这是肯定要改变的,除非没有干扰。
一个被干扰的电流,自然就是发生变化的电流。
你不能指望干扰后的电感后的电流不发生变化。
再次感谢大家!
最后,峰值电流模式就是控制峰值,和电感的电流平均值,有什么关系?
答案就是没有关系。
谢谢大家!
|
|
|
| | | | | | | 可以认为所谓的次谐波振荡,在国外就是已经概念错误了。
不知道何时才能按本大师的教导进行整改。
谢谢大家!
|
|
|
| | | | | | | 这个电感电流被扰动的稳定的波形说明,此时电感电流的充电和放电,是以一半的开关频率进行的,但这不是震荡,更没有次谐波振荡,而仅仅就是震荡周期变为了原来的一半而已,这是稳定的,也就是说,开环是稳定的,不需要其他补偿措施。
谢谢大家!
|
|
|
| | | | | | | 然而必须还是要明白的就是,占空比不可能达到100%,而是有最大限制的。
所以大部分情况下,并不可能发生等效的开关频率降低一倍的现象。
而是电感电流平均值减小了。
谢谢大家!
|
|
|
| | | | | 谐波补偿,已经沦落为因为电流模式的不完善,而导致的打补丁的补丁式样的工作了。
这足以说明电流型的PWM控制是不完善的。
谢谢大家!
你的斜坡补偿,是在篡改峰值控制的基本思想。
一旦斜坡控制补偿,就不是峰值电流模式的PWM了。
这是一个被限制了的电压模式。
谢谢大家!
|
|
|
| | | | | 本大师不否认。
战斗一线的国外电源工程师,发现的所谓“次谐波振荡”,以及所谓的斜坡补偿方法的,这是国外的电源工程师对于电子技术的杰出贡献,必定在人类历史上永放光芒。
谢谢大家!
但为何没有一本教科书,包括国外,能把所谓的次谐波振荡问题,说明明白?
因为学院式样的人物根本就不懂。
如果不是本大师在这个本大师创建的2流论坛里的耐心教导。
你们永远都不可能明白次谐波振荡的真实情况。
再次感谢大家!
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|








 收藏
收藏 分享
分享

 清楚
清楚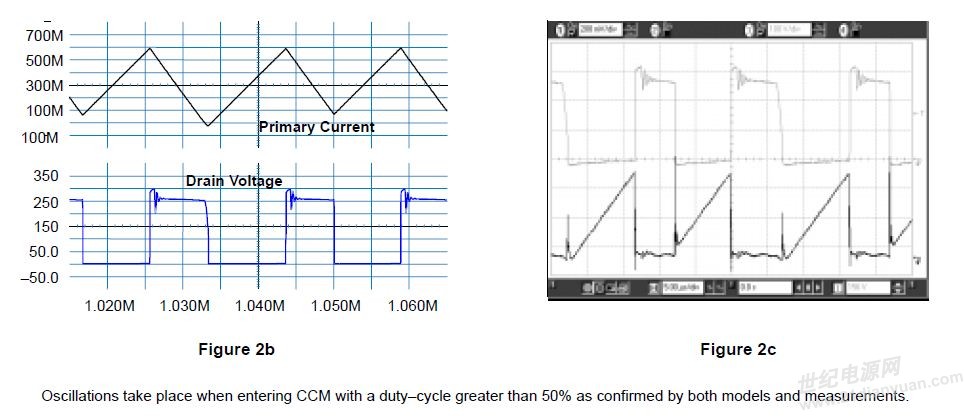




 就是这么回事的 ~
就是这么回事的 ~






 津公网安备 12010402000296号
津公网安备 12010402000296号