 |  | | | | 先赞一下, 不过600多页的工作量是非常大的,要完成这600多页的翻译很不容易。 |
|
|
| |  | | | | | 不容易啊,以前这本书有人要组织一群人来翻译。
现在好了,楼主一个人就搞定,让这些大师们,情何以堪啊! |
|
|
|
|
|
|
|
|
| | | | | 我并不是想挑战各位大师,只想同大家共同进步,仅此而已。
|
|
|
| | | | |
之前评估时就知道的确工作量很大,而且有的时候一眼就带过去的英文句子,要硬生生的翻译成中文总是觉得很别扭,难度也较大。就算LZ不自量力了。但是LZ保证会一直坚持,和大家共同学习。如果有人要进行后面章节的翻译请留言告知LZ哈。
说明下,英文版的文字我会按段落贴出来并标注页码,大家可以下载原书,如果觉得太大,可以留下邮箱,我有空就发给大家。
另外对英语基础较弱的同行:大家看的时候,可以先看英文,再和LZ的翻译对比,这样虽然慢了点,但既可以加深印象,又可以提高英文文献阅读的能力,以后看其他英文文章可能就相对轻松了。
对英文较强的同行或大师们:LZ翻译不当的地方,请各位指出。
愿同各位共同进步。
|
|
|
| | | | | <page 1>
Chapter 1 Basics of Loop Control
Often without knowing it, our everyday life utilizes loop control techniques: stretching our muscles to reach a pitcher and pour water into a glass, keeping the bicycle
speed constant despite a sudden uphill climb, or maintaining the right pressure on
the gas pedal to stay slightly below the maximum speed limit on a long straight
road. In all these cases, we have implemented a feedback control system: the brain
defines a setpointand uses muscles or mechanical power to execute the order. The
brain receives information on how the order is executed as the nerves (spinal, optical) permanently feed the information back to it. In the described chains, we have
associated a power-amplified control (of which the brain and the muscles represent
the direct path) with a return path(the nervous system). As the information leaves
the brain and returns to it via the nervous systems to correct or modify the muscular
motion, we say the system operates under closed-loopconditions. On the contrary,
when the return path is broken, the information confirming that the order has been
well or poorly executed is missing. The system is said to run open loop. Yes, if you
try to ride your bicycle while wearing a blindfold, the biofeedback loop is lost and
your body operates in open-loop conditions with all the associated risks!
第一章 环路控制基础
通常,尽管我们不知道什么是环路控制技术,但是我们在每天的生活中的都会用到它:伸手去拿水壶,然后往杯子里倒水;当突然出现斜坡时,保持自行车速度恒定;在一个很长的笔直公路上,合适地控制油门以保证速度稍微低于最大限速。在所有上述的情况中,我们都实现了反馈控制系统 。大脑先确定一个给定 ,并使用肌肉或者器械的力量去执行这个命令。随着神经(脊髓、视觉)一直反馈,大脑收到关于命令怎样执行的信息。在所描述的这个链条中,我们通过反馈路径(神经系统)用到了能量/功率放大控制(大脑和肌肉描述了前向路径)。随着信息由大脑发出,经过神经系统校准和修正肌肉的动作又回到大脑,我们认为这个系统工作在闭环条件下。相反地,当反馈路径被切断,判断命令是否已经被较好地的执行的信息就会丢失,这种情况下,我们称该系统工作在开环状态。对,假如你带着眼罩骑自行车,生理反馈环就会丢失,你的身体也就工作在伴随着相关风险的开环状态。
|
|
|
|
| | | | | 1.1 Open-Loop Systems
As outlined in the previous section, a system can either run in open-loop or closedloop conditions. An open-loop system transforms a control signal, the input, into
an action, the output, following a specific relationship that links the output to the
input. In this open-loop system, the control input uis independent from the output
y. Figure 1.1 shows a simple representation in the time domain of a system where
the output of the system relates to the input by a gain factor k. This system is often
referred to as the plantin the literature and is noted H.
1.1 开环系统
如上一部分概述,一个系统既能运行在开环状态,也能运行在闭环状态。根据输入、输出的关系,开环系统将控制信号, 输入,转变成一个行为, 输出。在开环系统中,控制信号输入u,独立于输出y。图1.1简单的描述了一个时域中的系统,其中系统输出通过一个增益系数k与系统输入相关联。这个系统在文献中通常被称为plant(可译为“被控对象”),并标注为H。

ps:请注意,在控制原理中,通常用字母“G”表示上述plant,用H表示反馈路径,而此书用H表示plant。另外,“输入u”,大家切记不要理解为电源的输入Vin。没有控制理论基础的同行可以先思考下,什么才是电源的“输入u”? |
|
|
|
| | | | | | | | | ……………………………………………………………………………………………………………………………………
此处为以前我对plant和controlled plant/controlled的解释,现在证明有不妥之处,故已删除
……………………………………………………………………………………………………………………………………
|
|
|
| |  | | | | | | | ……………………………………………………………………………………………………………………………………
此处为以前我对plant和controlled plant/controlled的解释,现在证明有不妥之处,故已删除
……………………………………………………………………………………………………………………………………
|
|
|
|
| | | | | | | | | | | | | ……………………………………………………………………………………………………………………………………
此处为以前我对plant和controlled plant/controlled的解释,现在证明有不妥之处,故已删除
……………………………………………………………………………………………………………………………………
|
|
|
|
| | | | | | | | | | | | | | | | | 谢谢拿出证据,受教了,呵呵!
我再找一些其他的文献看下,如果确定plant=controlled plant/object,我会将前面该英文术语的翻译进行更新!
请帮忙继续找出其他问题…… |
|
|
|
|
|
|
|
| | | | | | | 楼主,那在控制理论中,电源的输入u到底是什么?是不是把电源拆分成各个独立的模块,每个模块都有各自的输入?-----你的意思是不是我说的这个? |
|
|
| | | | | In this diagram, the rectangle represents the transmission chain, whereas the
arrows portray the physical input and output variables. Please note the usage of letters uand yto respectively designate the input and the output signals as commonly
employed in textbooks. In this drawing, the relationship linking the output yto the
input uis simply:
在该图表中,矩形描述的是表示传递链,而箭头描述了物理输入、输出变量。请注意字母“u”和字母“y”在课本中通常分别表示输入信号和输出信号。该图中,输出y和输入u可简单的写为:

|
|
|
| | | | | As it is assumed that coefficient kdoes not change with time, the system is said
to be linear time invariant(LTI).
当系数k不随时间推移而改变,那么这个系统称为线性时不变系统(LTI)。
|
|
|
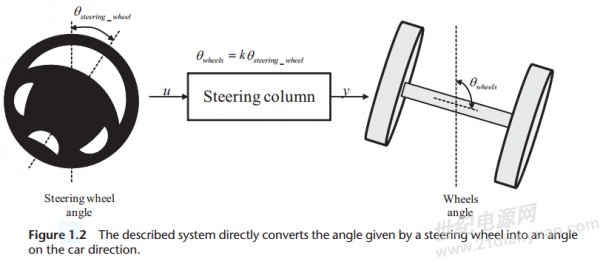
| | | | | An application example fitting this model is a person turning a car steering
wheel by an angle of θdegrees (the input) to force the wheels turning by an amount
of kθdegrees (the output) on the road. This is what Figure 1.2 depicts. In the early
days of cars, the coupling between the steering wheel and the wheels involved mechanical linkages and hydraulic actuators. Turning the wheels at no or low speed,
for instance during parking maneuvers, could quickly turn into a physical exercise
for the driver, depending on the size of the car. The power or the force available at
the output of the system was almost entirely delivered by the control input—the
driver’s biceps, in this case!
有一个应用实例适合于这个模型:某人转动汽车方向盘θ角度,迫使车轮在路面上转动kθ角度。如图1.2所示。早期的汽车,方向盘和车轮两者是通过连杆机构与液动装置相关联的。在停车练习中汽车禁止或低速行驶时,根据车的大小尺寸,转动车轮会立即变成司机的体力活。这种情况下,系统输出所获得的能量几乎完全由控制输入——司机的二头肌所提供。
 |
|
|
| | | | | | | 楼主译的很好,向楼主致敬。
以下纯学术交流,没有其他意思,如有不当请批评指正。
Turning the wheels at no or low speed, 这里的 ”at“ 是 ”以....速度“的意思, at no,就是没有速度,没有速度就是静止,整句可以译成”转动一个处于静止或低速行驶中的车子的方向盘“
during parking maneuvers,这里的parking 是泊车的意思,与停车的意思稍有不同。
|
|
|
| | | | | | | | | at是介词,在此处的确是“以……速度的意思”。
the wheels是表示车轮哦!
我上面的翻译是“汽车静止或低速行驶时,转动车轮……”(写成了“禁止”)
按你的翻译 “转动处于静止或低速行驶的(汽车)车轮……”我觉得也挺好!
(刚查了下百科和词典解释)
泊车: 外来语,即停车,存放车辆。由粤语和英语混合而成。
解释:外来语,停车,存放车辆。“泊”的广东话发音跟英文的park接近,起源于香港的“park车”,这个词是一半英文一半中文组成的。 |
|
|
| | | | | | | | | | | 楼主说得对 “the wheels是表示车轮”。主要是句子里用到了复数,方向盘只有一个,如果是指方向盘必须是单数。
虽然泊车是外来语,但为何要强调parking是“泊车”主要是泊车意指将车停放在某处,比如停放在停车场 parking lot,只有在 parking lot 可以将车停放在那里。而停车就不同了,只能听不能放,比如公交站 叫stop,只能停一下,而在马路上就更不能开开停停了。
仅供参考 |
|
|
|
|
| | | | | In Figure 1.2, where no amplification chain exists, it is extremely difficult to
convey the force over a long distance from the control source to the output without losses or distortion. The exercise becomes even more difficult when geometric
shapes are needed to accommodate a complex environment: curvatures, noncollinear shafts, and so on. Fortunately, this is no longer an obstacle when a power-
amplified chain is implemented, as in Figure 1.3. Despite a long distance between
the control input and the delivered output, it is easy to transport an electrical signal
through a pair of wires and reach a motor or an actuator placed in a remote location. Named x-by-wire, this technique nowadays replaces the mechanical and
hydraulic links by an electronic control system using electromechanical actuators
located close to the point of action: we have seen the steering control for a car
(steer-by-wire), but it can be the controls in an aircraft that actuate the flaps or
adjust the engine rotation speed (fly-by-wire).
在图1.2中,没有放大链条存在,若想要从控制源到输出这一较长的间距中无损、无失真的传递能量,是非常困难的。当几何形状被用来调节一个复杂的环境——弯曲程度、非共线轴等等时,这种情况会变得更加糟糕。幸好,如1.3所示,当功率放大链条实现后,这已经不是什么问题了。尽管在控制输入与被控输出间有很长的间距,通过一对导线承载电信号并抵达马达或远程的执行机构却很容易。现如今,线控技术已经用电子控制系统取代了机械和液压连接,该控制系统使用了靠近力作用点的电动机械执行机构:过去,我们已经看到了对汽车驾驶的控制(线控驾驶);现在,在飞行器上,驱动副翼或者调整引擎转速同样可被控制(线控飞行)。
|
|
|
| | | | | <page 3>
1.1.1 Perturbations
In the described example, we have only considered a single input and a single output. In textbooks, these systems are referred as single-input-single-output (SISO)
systems. In reality, any system is affected by several input variables. Therefore, if
several input variables are considered, we can envisage as many output variables.
In the literature, such a configuration is referred as a multi-input-multi-output
(MIMO) system.
1.1.1 扰动
在所描述的例子中,我们只考虑了单输入、单输出的情况。在书本上,这种系统被称为SISO。事实上,任何一个系统都会被几个输入变量影响。因此,如果我们要考虑几个输入变量,那么我们也会面临多个输出变量。在相关文献中,这种结构被称为MIMO。
|
|
|
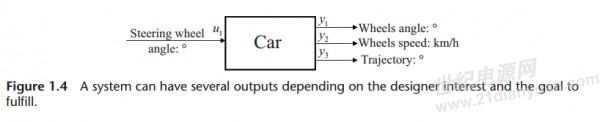
| | | | | Regarding the outputs, we usually select the main output the one that is the
most interesting to the designer. In our steer-by-wire system of Figure 1.3, the main
output is the angle of the wheels on the road. However, we know that the built-in
differential system strives to ensure an evenly distributed torque to each wheel,
while allowing them to rotate at different speed. Output variables such as the individual speed of the wheels could then be monitored to deliver information when
the car drives along a curve. Another output to consider is the car trajectory, as this
is the ultimate goal: forcing the vehicle to follow a curve by acting on the steering
wheel without losing car control. Considering all these output variables, the illustration can be updated as Figure 1.4 portrays.
尽管输出有多个,但通常只有设计者最感兴趣的那个输出才会被选择为主要输出。在图1.3的线控驾驶系统中,主要输出就是公路上车轮的角度。然而,我们知道差动装置尽力去确保每个车轮均匀地分配得一定扭矩,同时允许它们在不同的速度下转动。当汽车沿着弯道行驶时,输出变量,如每个车轮的速度,可以被监测从而传递信息。另一个需要考虑的输出就是汽车行驶轨道,因为这是最终目标:对方向盘动作迫使汽车沿弯道行驶而不会失控。考虑所有输出变量时,示意图可以用图1.4修正。
 |
|
|
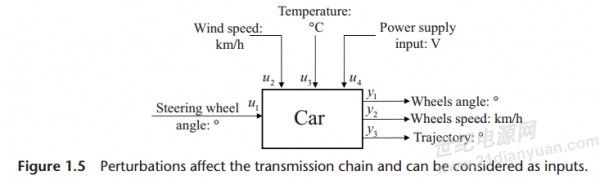
| | | | | The main input to a control system is usually the one that the output must follow. In our steer-by-wire system, the steering wheel signal obviously represents the
main input. However, there could be other inputs that affect the transmission chain.
As these inputs are usually undesirable, they are considered as perturbations. In our
example, assume you try to negotiate a curve in presence of a strong wind. Despite
the angle imposed to the car by the steering wheel, you will experience a trajectory
deviation. The wind is a perturbation that affects an output, the trajectory. As the
assistive torque is derived from an electric motor, the power source supplying the
amplifier is getting weak: the high internal temperature lowers the storage inductor value, and the lack of power affects the actuator responsiveness: the imposed
angle is not properly replicated on the wheels. The power supply, when its voltage
fluctuates, represents a perturbation affecting the transmission chain. All these perturbations can be treated as multiple inputs that have to be accounted for during
the design phase. The ultimate goal is to build a rugged device, insensitive to these
perturbations. Figure 1.5 represents the system where these individual contributions appear.
控制系统的主要输入通常是输出必须跟随的(ps:输出跟随给定)。在线控驾驶系统中,方向盘角度显然代表了主要输入。然而,也有其他的输入影响着传递链。因为这些输入通常是不想要的,通常称它们为 扰动。在上面的例子中,假定你试图驶过一个弯道,却伴随着一阵强风。就算你通过方向盘为汽车强加了一个合适的角度,因为强风的原因,你也会偏离原轨道。强风就是影响输出——轨道的扰动。因为辅助扭矩是从电动机获得,放大器供电的功率源性能因此变弱,内部高温降低了储能电感值,提供功率不充足影响执行机构的响应:想要加在车轮上的转角并不会正好复现。对电源而言,当其电压波动时,证明有扰动影响了传递链。所有的扰动都可以视为多输入,必须在设计阶段讲它们纳入考虑范围。最终的目标是建立一个稳健的、对扰动不敏感的设备。图1.5描述的系统中,这些扰动的影响均已出现。
|
|
|
| | | | | <page 4>
1.2 The Necessity of Control—Closed-Loop Systems
In the previous systems, a relationship exists between the input and the output of
the system. This is our coefficient k, linking the steering wheel angle and the actual
angle applied to the direction system. In reality, because of the numerous perturbations or deficiencies in the transmission chain itself, the final output value may never
reach the setpoint imposed by the input. For instance, the coefficient kin Figure
1.1 may have great variability itself, linked to the ambient temperature or process
variations. How can we counteract the deficiencies in the chain? In our car example,
we could imagine a sensor actually measuring the real angle applied to the wheels
based on the steering wheel position. This sensor could be a simple potentiometer
or a digital rotary encoder. A calculator could then evaluate the difference, or the
error, between the imposed setpoint and the obtained angle read by the sensor. In
the literature, this error is noted ε(epsilon) and represents the difference between
the input setpoint and the final output:
1.2 控制系统的必要性——闭环系统
在前面的章节中,系统的输入和输出之间存在一个关系。正是系数k,连接了前向系统中方向盘转角和实际汽车转角。事实上,由于多个扰动和传递链本身的缺陷的存在,最终的输出值并不会达到输入所强加的给定。例如,考虑到表面温度或工艺变化,图1.1中系数k本身有很大的可变化性。我们怎么解决传递链中的这些缺陷呢?在汽车的例子中,我们可以设想一个传感器去测量基于方向盘方位的实际车轮转角。这个传感器可以是简单的电位计或旋转式的数字编码器。然后计算机计算出强加的给定(ps:希望车轮的转角)与传感器测得的实际车轮转角的偏差或误差。在相关文献中,误差标识为 ε(epsilon),代表了输入给定与最终输出的偏差:

|
|
|
|
|
| | | | | <page 5>
If the output yis too large compared to the target imposed by u, the error signal εwill decrease, commanding the system to reduce the output. On the opposite,
if the output is too small, εwill grow, commanding an increase of the output. As
a first approximation, we can say that the system operates adequately and reaches
equilibrium as long as the error signal opposesthe output variation. If for any
reason this relationship is lost (i.e., the negative sign in (1.2) becomes positive), the
system can run away and will quickly hit its upper or lower stops. We will come
back on this important point in a while.
如果输出y与输入u强加的目标相比太大,误差信号ε将减小,从而使系统减小输出;相反的,输出太小,ε讲增大,使输出增加。第一个近似,只要误差信号与输出变化方向相反,我们认定系统正常的运行,并工作在稳定状态。假如因为任何原因导致该关系不成立((1.2)式中的减号变成加号),系统很快就会跑飞,并抵达输出最高点或最低点。稍后,我们将回到这个重要的问题上来。
|
|
|
|
| | | | | | | 辛苦了 最感谢楼主的PS:还为大家讲解知识点,再次感谢!! |
|
|
| | | | | 为什么截图全有问题呢?还有,360浏览器和搜狗浏览器都没办法登陆哦,之前我发帖的时候搜狗和360还可以登陆的,过两天后搜狗不能登陆,360能登陆,现在只有IE才能登陆了!会不会明天IE都登不上?
点击“登陆”就被弹到网站首页http://www.21dianyuan.com/,大家知道是什么情况吗? |
|
|
| | | | |
In the Figure 1.6 example, the control input can be variable or fixed. Imagine
the driver is on a road and maintaining the wheels straight for a long period of
time. In that case, the system simply maintains the output constant and keeps the
wheels in the defined axis, fighting against perturbations (i.e., wind) to maintain the
trajectory. The system is told to be a regulatoror a regulating system. A regulator is
a control system operating with a constant input or setpoint that maintains a fixed
relationship between the setpoint and the output, regardless of what the perturbations are. A voltage regulator is another example: it maintains a constant output
voltage despite its operating environment, such as input voltage (ac or dc) and output current changes. In this book, we will mostly deal with power converters delivering a fixed output voltage or current, naturally falling into the regulator area.
在图1.6的例子中,控制输入可以是变量也可以固定为常量。想象一下,司机在公路上一段时间内保持车轮沿直线行驶。这种情况下,系统简单的维持输出为常量,保持车轮在既定的轴线上,抵抗扰动(如:强风)从而使汽车运行在该轨道上。这个系统被称为调节器或自调系统。调节器是一个控制系统:其输入或给定为常量,无论扰动是什么,给定与输出之间保持一个固定关系。另一个例子是电压调节器:不论其工作环境怎样变化,如输入电压(交流或直流)或输出电流改变,它始终保持恒定输出。本书最主要的就是处理输出固定电压或电流的功率转换器,它自然也属于调节器的范畴。
ps:此处描述的调节器(regulator),按作者的意思是指整个控制系统,如电源。这类控制系统通常称为恒值控制系统。事实上后面的章节,我们将接触到“校正器”,但是国内有很多关于控制理论的文献也将校正器称为调节器,它通常是指在原系统中加入的控制调节部分,如PID调节器。请注意不要混淆。
|
|
|
| | | | | If the input permanently changes with time, the control system must ensure
that the output precisely tracks the input. The French language uses the term “asservissement” (enslavement) to designate such a system. It literally means that the
output must be slave to the input. The goal of such a system is indeed to maintain
a relationship between the output and the input regardless of the speed and the
amplitude at which the control input changes. Such a system is called a feedback
control system. Audio amplifiers, the autopilot in aircrafts, or marine navigation
systems are good examples of feedback control systems, also denominated servomechanismsfor the latter, as the controlled variable is a mechanical position. They
all use complex feedback architectures to ensure the output perfectly follows the
changing setpoint regardless of what the perturbations are (wind speed, stream
strength, and so on).
假如输入一直在变化,控制系统必须确保输出精准的跟随输入。法语用“奴役”这个词语来指定这种系统。其字面意思输出必须受控于输入。无论控制输入的改变的速度或幅值怎样,这种系统的目标就是保持输出与输入之间的固定关系。这种系统称为反馈控制系统。扩音器、飞行器自动驾驶仪、航海系统都是反馈控制系统中较好的例子。后者也称为伺服机构,因为被控变量是机械位置。无论扰动是什么(风速、浪涌强度等),伺服机构都会使用复杂的反馈结构来确保输出完美地跟踪随时改变的输入。
ps:LZ认为此段定义的“反馈控制系统”并不恰当,定义成“随动系统”可能更合适。因为按控制原理中的定义,控制输入为常量的系统(恒值控制系统)也统称为反馈控制系统,如电源。不过大家也不必纠结于此,虽然这些定义比较混乱,但仅是一个定义而已,无伤大雅。对此感兴趣的朋友可以翻翻其他相关文献。
|
|
|
| | | | | In all the cited examples, an extreme precision is needed in the delivered variable: you cannot afford to have a mismatch of several degrees in the control of an
aircraft flap for instance. Such a system must be extremely sensitive to the smallest deviation detected between the setpoint and what the sensor returns. To be that
sensitive, it is necessary to amplifythe error signalε. When amplified, a small output deviation becomes a variation of higher amplitude that the system can properly
treat. The gainof a system therefore directly relates to the amount of feedback and
hence to its precision: a highly precise system exhibits a high static(also called dc)
gain in the control path. No gain, no feedback—that is to say you must have gain
in the loop to realize a control system.
在前面所引用的例子中,传递的变量都需要非常精准:例如在控制飞行器副翼时,你不可能让其偏差好几度。这种系统必须对给定值与传感器反馈回来的值的微小偏差极其敏感。为达到这种敏感度,必须放大误差信号ε。当放大后,一个较小的偏差幅值会变得更大,以至于系统可以更恰当的处理它。因此,系统增益与反馈值和精度直接相关:高精度系统在控制路径中呈现出更高的静态增益(直流增益)。没有增益,就没有反馈——也即是说,要实现控制系统,环路中就必须有增益。
ps:在后面章节会说明,为什么高输出精度需要高静态增益。请大家从这个角度思考下,为什么用光耦+稳压管稳压比用光耦+TL431做稳压时精度差很多?
|
|
|
| | | | | <page 6>
1.3 Notions of Time Constants
A control system, regardless of its implementation, usually reacts with delay when
adjusted to a new setpoint or in response to a perturbation. This delay is inherent
to the control chain, as the signal is conveyed through mechanical, physical, or
electronic paths. For instance, in our electric power steering system, when you turn
the steering wheel, it takes a certain amount of time for the order to propagate as
an angle change on the wheels. Another classical example is the heating system in
your house: you program a particular temperature setpoint in the presence of other
room parameters (e.g., volume, air flow), but you will need to wait tens of minutes
if not an hour before the system, via the sensor, considers the read temperature to
be adequate. In these examples, the time needed by the system to change from one
state to another is called the time constant, noted t, (Greek letter “tau”) and relates
the system response to a time (s). The time constants can vary from a few milliseconds in the first case to seconds or hours in the given example.
1.3 时间常数的概念
一个控制系统,无论怎样实现,当它调整以适应新的给定或响应扰动时,通常伴随着延时。延时是控制链中固有的,因为信号通过机械、物理或电路径传递。例如,在电力转向系统中,当转动方向盘时,随着车轮角度改变,需要一定时间传递命令。另一个典型的例子是房间中的加热系统:当存在与房间温度相关因素(如房间容积、空气流量)时,设定一个温度给定值,需要等几十分钟甚至一个小时,系统才能判定由传感器读取的温度达到给定值。在这些例子中,系统从一个状态转变成另一个状态所需的时间称为时间常数,标为τ(希腊字母“tau”),它使系统的响应与时间相关联。在前述的例子中,时间常数可以是第一种情况下的几毫秒,也可以是几秒或几个小时。
|
|
|
| | | | | There are many possible ways to represent the time constant of a first-order
LTI system; however, they all obey a common differential equation. For electrical
engineers, a simple representation is an RCfilter as shown in Figure 1.7.
The output voltage y(t) of such a network can be obtained after a few lines of
algebra:
有许多方式描述一阶LTI(线性时不变)系统的时间常数,然而它们都遵从一个共有的微分方程。对电学相关工程师而言,一个简单的描述是图1.7中的RC滤波器。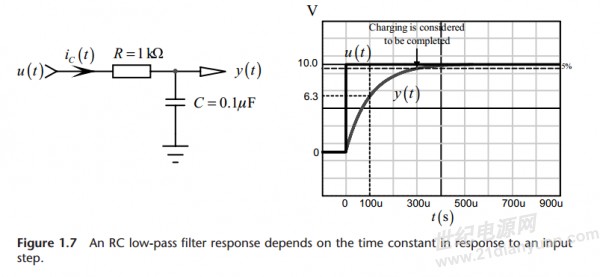
这种网络的输出电压y(t)可以通过几个代数式获得:
 |
|
|
| | | | |
<page 7>
The current in the capacitor depends on the voltage variation across its t erminals: Substituting (1.4) into (1.3) and rearranging, we have an equation describing
the behavior of a linear time invariant first-order system:
With RC τ= , the time constant of the system. If R= 1 kWand C= 0.1 µF, we
have a 100-µs time constant.
电容流过的电流,由它两端的电压变化决定:
 将(1.4)带入到(1.3),并重新整理,可以得到一个等式,描述了一阶线性时不变系统:
将(1.4)带入到(1.3),并重新整理,可以得到一个等式,描述了一阶线性时不变系统:
 其中τ= RC为系统的时间常数。若R= 1 kΩ,C= 0.1 µF,时间常数就是100µS。
其中τ= RC为系统的时间常数。若R= 1 kΩ,C= 0.1 µF,时间常数就是100µS。
|
|
|
| | | | | The solution to such a differential equation can be found by different means
such as the inverse Laplace transform, as we will later see. It can be shown that the
solution follows this form:
where A and B are constant numbers found by solving a 2-unknown/2-equation
system for
èøand the initial conditionat
èø. An initial
condition represents the value of the statevariable at the beginning of the observation. It can be the current in an inductor or the voltage across a capacitor (for instance, when t= 0). In Figure 1.7, if we consider the input signal u(t) to be a voltage
step of amplitude Vcc
, then the voltage across the capacitor nC(t) is simply
解微分方程的有多种方法,例如我们后面将看到的反拉氏变换。可以看出,方程的解为如下形式:
 其中A和B是常量,通过解含两个未知量/两个方程的系统:
其中A和B是常量,通过解含两个未知量/两个方程的系统:
 ,和初始条件下的 ,和初始条件下的  。 。
初始条件描述了观测开始时的状态变量。它既可以是电感中的电流,也可以是电容两端的电压(例如,当t=0时)。在图1.7中,如果把输入信号视为幅值为Vcc的阶跃信号,那么电容两端的电压Vc(t)可简化为:

|
|
|
| | | | | This is the familiar exponential curve shown on the right side of Figure 1.7. The
time constant can be determined for tequals t, reached when
Solving for the corresponding value of vC(t), we have:
We can apply this definition to our example. As Vcc
equals 10 V, the capacitor
will reach 6.3 V after tseconds. If we read the x-axis for vC(t) = 6.3 V, we can determine the system time constant. In this example, it corresponds to 100 µs, the value of
the RCproduct used in the circuit. In a first-order system, the output is within 5 percent of the final target after 3τhave elapsed. In our example, if the input voltage corresponds to a sudden setpoint change and our control system exhibits a 100-ms time
constant, the output of the system will be considered within limits after 300 ms.
这是一种常见的指数曲线,如图1.7右图所示。时间常数可以设定为t=τ,此时,由(1.7)式得 ,解vc(t)上相对应的值得: ,解vc(t)上相对应的值得:

我们可以将该值应用到例子中。当Vcc等于10V时,电容电压在时间τ后,达到6.3V。若对应Vc(t)=6.3V,读取x轴,可以获得系统时间常数。在此例中,对应为100 µs,即电路中RC的乘积。在一阶系统中,时间3τ后输出达到最终目标的5%以内。该例中,若输入电压给定突然发生变化,系统时间常数为100 µs,系统输出在300 µs后,达到5%的限定范围以内。 |
|
|
| | | | | <page 8>
1.3.1 Working with Time Constants
The time constant represents one of the most troublesome natural parameters in a
control system. Why? Because when the loop observes the output while the control input changes, it sees a variable out of range for a certain time: you change the
temperature setpoint in the house and no significant temperature variation happens
on the sensor before tens of minutes. As a result, the error signal between the setpoint and the returned value is maximum, pushing the system in its upper or lower
power limit with all the associated problems (over power, runaway risks, and so
on). Is there any wise control strategy, leading to a more reasonable reaction? One
widely adopted solution consists of combining the following actions:
1.3.1 处理时间常数
在控制系统中,时间常数是一个非常难处理的固有参数。为什么呢?因为当环路监测输出而输入同时也在变化时,在一定时间内,将会看到变量超出了范围:几十分前,改变室内温度给定值,且传感器测得的温度没有发生较大的变化。结果,给定值与反馈值间的误差信号达到最大,使得系统达到更高或更低的功率限制,这会导致一些问题(如过功率,失控等)。有什么明智的控制策略能使其有更合理的反应(响应)吗?一种广泛采用的办法是结合以下的几种方式:
The principle is to link the control voltage amplitude to the difference sensed
by the system between the setpoint and the controlled output. Why overamplify a moderate change if a small increase of the control voltage is the right
answer? On the other hand, if the change amplitude is large, then it should
be compensated with a stronger control voltage. In other terms, it is desirable
to have a control voltage amplitude proportionalto the detected change in
the error signal.
在给定电压和被控的输出电压之间存在一个偏差电压,需要将“控制电压”与“偏差电压”相连接。假如一个较小的“控制电压”增量比较合适,何必需要过度的增加其变动呢? 另一方面,假如改变的幅值过大(输出电压偏离“给定”较多,即误差信号较大),就需要一个更大的控制电压。换句话说,让控制电压正比于误差电压就再好不过了。
If a drift on the controlled variable or a slow setpoint transition is sensed, •
why immediately push the control signal to its upper or lower stop? If the
perturbation or the change in the operating point is slow, then let’s slow
down the reaction. On the other hand, if the control chain senses a fastmovin g perturbation, let’s make it react quickly. The control voltage must
thus be sensitive to the slope of the error signal. How do we compute the
slope of an error signal? By taking its time derivative.
假如被控变量有一个小的漂移或者“给定”有一个缓慢的变化,被检测到(ps:即误差信号缓慢变化),何必立即把控制信号推到上限或下限呢?假如在工作点上,出现缓慢变化的扰动或变动,那么可以把系统反应也放慢一点。另一方面,假如控制链上检测到一个快速变化的扰动,那么就需要让系统快速的反应。因此,控制电压必须对误差信号的变化斜率足够敏感。我们怎么样计算误差信号的斜坡呢?采用对时间的“微分”。
Finally, we want to obtain a very precise controlled output, exactly matching •
the setpoint. One way to fulfill this goal is to increase or decrease the control
voltage until the detected error signal is null, meaning the output is right on
target. In a control system featuring a permanent error between the setpoint
and the output, the error voltage is flat: there is nothing the system can do to
correct the situation. How do we transform this flat voltage into a growing or
decreasing control signal to force the error reduction to zero? By integrating
the error voltage. This way, we will obtain a ramp, up or down, automatically driving the control voltage until the error becomes zero.
最后,我们想要获得一个精准的被控输出,正好和“给定”匹配。实现这个目标的一种办法是增加或减小控制电压直到被检测到的误差信号为0,意味着输出正好达到目标。在一个“给定”和被控输出间存在恒定偏差的控制系统中,误差电压是平坦的:系统没有任何办法去校正这种情况。那么我们怎么将这种平坦的电压转变成正在持续上升或下降的控制信号从而强迫误差信号减小到0呢?对误差信号进行积分。用这种方法,我们能获得一个上升或下降的斜坡,自动的驱动控制电压直到误差变为0。
ps:以上3段分别描述PID控制中的P(比例控制),D(微分控制),I(积分控制)。
|
|
|
| | | | | | | 相当给力!
大神朋友,前面几楼的图挂了,能不能麻烦补一下啊。
感谢不尽~~ |
|
|
| | | | | | | | | ok,稍后补起……别叫我大神哈,免得我被别人鄙视哈! |
|
|
| | | | |
These functions are usually implemented in a compensatingblock taking place
after the error signal. The output of this block becomes the new control voltage,
v
c
. As designers combine a little bit of these functions via the tweaking of their
associated coefficients, we call this block a proportional-integral-derivative (PID) compensator. The term compensatormeans that we want to compensate for system
imperfections by purposely tailoring the return chain. Figure 1.8 shows the corresponding update on our control system, including the signal names that we will
adopt.
这些功能(函数)通常由误差信号后面的校正方框实现。该方框的输出成为新的控制输入,Vc。由于设计者通过调整这些功能(函数)相关的系数来对它们进行组合,我们把这种框称为PID校正器/补偿器。“校正/补偿”这个术语意味着,有目标地调整反馈链从而“校正/补偿”系统的缺陷。如图1.8所示,对控制系统进行了相应的更新,其中包含了后面我们会使用的信号名称。
ps:校正器or补偿器?LZ最先接触“校正器”这个说法,所以就习惯称之为校正器了。后面的章节都如无特殊情况,都将使用“校正器”这个术语来取代“补偿器”。其实按英汉词典上的翻译,“补偿器”可能更合适。也有人说corrector才是校正器,不过无所谓了,一个中文名称而已。随大家喜欢吧!
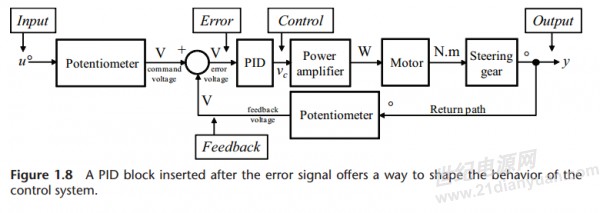
Figure 1.9 shows the typical response of a second-order closed-loop system to
a change in the setpoint and illustrates the imperfections we talked about. You can
see the output y(t) takes off toward the target and needs a certain time before reaching it. At some point, it even exceeds this target to stabilize to a lower value, giving
birth to a permanent mismatch. Implementing PID compensators or correctors will
help to minimize these imperfections, leading to control systems exhibiting precision and speed without overshoot. We will study this response in Chapter 2.
图1.9所示为一个典型的二阶闭环系统对给定值发生变化时的响应,并说明了我们之前所说的缺陷。可以看到,输出y(t)向着目标前进,在实现目标前,需要经历一段时间。某些情况下,它也甚至超出了目标,而又稳定在一个更低的值上,与目标值间存在一个恒定偏差。采用PID校正器,将帮助减少这种缺陷,实现精准、快速、无超调的控制系统。我们将在第二章学习这种响应。
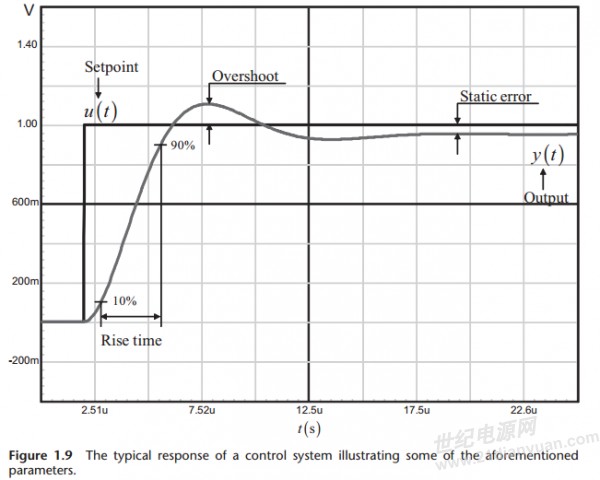
图1.9所示为一个典型的二阶闭环系统对给定值发生变化时的响应,并说明了我们之前所说的缺陷。可以看到,输出y(t)向着目标前进,在实现目标前,需要经历一段时间。某些情况下,它也甚至超出了目标,而又稳定在一个更低的值上,与目标值间存在一个恒定偏差。采用PID校正器,将帮助减少这种缺陷,实现精准、快速、无超调的控制系统。我们将在第二章学习这种响应。
Please note that the rise time is measured from 10 to 90 percent of the rising
waveform, but the definition can vary. In Chapter 2, it is considered from 0 to
100 percent.
请注意,此处的定义的上升时间是波形上升阶段从10%到90%的时间,但这个定义可以改变。在二章中,将考虑从0到100%。
ps:此处所说的“快速”对应电源的什么性能?Type I、II、III型补偿与PID控制有什么关系? |
|
|
| | | | |
<page 10>
1.3.2 The Proportional Term
The idea is simple: if the deviation or the mismatch with the target is big, the control
signal v
c
is increased. As the opposite, if the distance from the output variable to the
expected target is small, a control signal of low amplitude will be generated. With
this approach, a proportional relationship exists between the error signal and the
deviation amplitude. This link is implemented with a proportional gainintroduced in the control chain. It is usually noted kp
, as shown in the left side of Figure 1.10.
How much gain is needed? In a heating system, if the generated power is high (high
kp
value) the output (the heat in our case), will make the temperature rise at a fast
pace. On the contrary, if kp
is small, the heat increase will be slower. In case the
temperature in the room changes too rapidly, because the heater is pushed to the
maximum (kp
is big), there are chances that the target is reached and then exceeded
before the loop detects it: an overshoot is created. On the contrary, if you accept
a slower but steady reaction (kp
is small), you will limit the overshoot amplitude
when reaching the adequate temperature: a proportional gain affects the reaction
speed but also the overshoot amplitude.
1.3.2 比例项
这个理念很简单:若与目标值的偏差或不匹配程度较大,就增加控制信号Vc。相反的,如果输出变量与期望目标偏差较小,将生成幅值较小的控制信号。用这种方法,误差信号与偏差幅值(ps:)间存在一个比例关系。这种关系由控制链引入的比例增益实现。通常,标注为kp,如图1.10中左图所示。需要多少增益呢?在加热系统中,加入产生的功率较高(kp较大),输出(在此例中指温度)将是气温快速上升。相反地,如果kp较小,温度上升相对也更慢。当心室内气温变化过于快速,因为加热器速度被设定为最大时(kp较大),有可能目标值抵达后,环路在检测到信息前,温度已经超出范围:出现过冲。相反地,如果你接受一个更慢但是稳定的响应(kp较小),当达到足够的温度时,将会限制过冲幅值:比例增益影响响应速度,同时也影响过冲幅值。
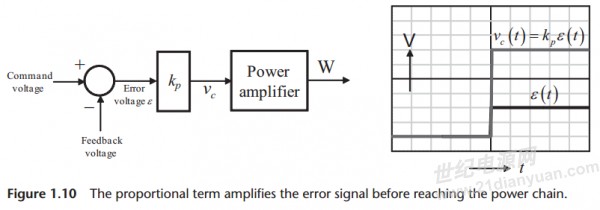
According to Figure 1.10 drawing, the error signal defined by (1.2) now undergoes a transformation before controlling the amplifier. It becomes
如图1.10所示,1.2式定义的误差信号在控制放大器之前,需要先经历一个转变。变为:

If the error voltage ( ) t ε is a step, its transformation through (1.9) becomes the
scaled-up signal shown on the right side of Figure 1.10.
假如误差电压ε(t)是阶跃信号,由(1.9)式转变后变成一个按一定比例放大后的信号,如图1.10中右图所示。
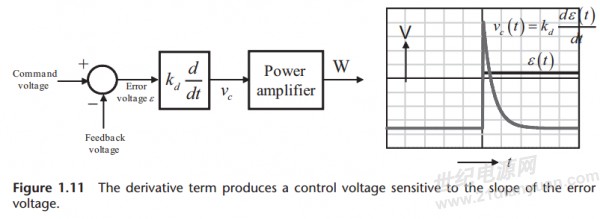
1.3.3 The Derivative Term
If a gain factor kp
is needed for reaction speed, you could also pay attention to the
error signal slew-rate. For a slowly moving error signal, why rush the loop and risk
the output overshoot? On the contrary, if the error signal is moving quickly, you
must make sure the control signal is sufficiently large to impose a fast-paced change
on the output. How do we know if the system requires a small driving signal or a
larger one? By looking at the error signal slope. This slope can be assessed by the
introduction of a derivative coefficient, noted kd
in Figure 1.11.
According to the drawing, the control voltage v
c
becomes
1.3.3 微分项
假如增益系数kp需要保证反应速度,可以留心误差信号的变化速率。对一个缓慢变化的误差信号,何必让环路如此快速,且担着输出过冲的风险?相反的,如果误差信号快速变化,必须保证控制信号足够大从而使输出也快速的变化。怎么样才能知道系统需要的驱动信号的大小呢?通过观察误差信号斜率。这个斜率可以通过引入一个微分系数来评估,在图1.11中标注为kd。
 由图所示,控制电压Vc转变为:
由图所示,控制电压Vc转变为:

In presence of a fast setpoint change, the control voltage will quickly react
thanks to the derivative term in (1.10). This is what the right side of Figure 1.11
shows you. For the opposite, when the change is slow, the control voltage will be of
lower amplitude. We will later see that the presence of the derivative term contributes to slowing down the system as it also opposes any output variation, including that driven by the loop in response to a perturbation. As a result, the recovery time
is affected by the derivative term. Its presence, however, naturally limits the output
overshoot.
当给定值快速变化时,由于(1.10)式中微分项的存在,控制电压将快速的动作。如图1.11中右图所示。相反,如果变化较慢,控制电压幅值相对也会更低。稍后,我们将看到,微分项的存在拉低了系统的速度,同时抵抗所有输出的变化,包括响应扰动时由环路驱动的输出。结果导致恢复时间被微分项影响。然而微分项的存在也限制了输出过冲。
ps:这段话怎样理解? |
|
|
| | | | | <page 11>
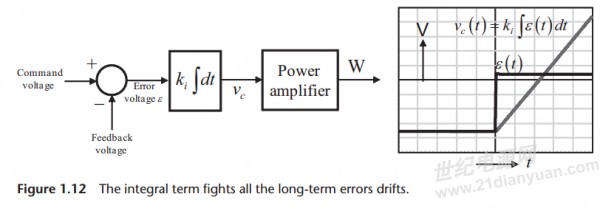
1.3.4 The Integral Term
What you want from a control system is precision—in other words, the least error
between the setpoint and the controlled variable. If the weighted combination of
coefficients like kp
and kd
help to reach the target on time while minimizing the
overshoot, you need the system to keep its precision over time. In other words, if kp
and kd
clearly affect the transient response, you need another function block that
accumulates or integratesover time all the long-term errors, eventually canceling
the static/dc error. This coefficient is an in integralterm, noted ki
. It appears in the
left side of Figure 1.12. With the presence of the block, the control voltage in the time domain
becomes
1.3.4 积分项
你希望从控制系统得到的是一个精准的输出——换句话说,给定值与被控变量两者间的误差达到最小。如果调整像kp、kd这样的系数的比重有助于适时达到目标值,并使过冲达到最小,那么过后需要系统输出保持一定精度。换句话说,如果kp、kd明显的影响了瞬态响应,你需要另一个功能/函数框随着时间对持续的误差进行积累或积分,最终抵消静态/直流误差。积分项的系数标注为ki。如图1.12中左图所示。
 存在此方框时,时域上控制电压变为:
存在此方框时,时域上控制电压变为:

If you integrate a constant signal of i kεamplitude, you obtain a ramp following ci vkt ε =×, where tis the elapsed time. As the resulting control signal increases
permanently for a constant error, we assume that the target will be exactly matched
after a certain amount of time: systems including an integral term are called nullerror systems.
如果对幅值为ki*ε常数信号进行积分,将获得一个斜坡信号vc=k*ε*t,其中t为经过的时间。对一个常数误差,随着产生的控制信号持续增加,我们认定一定时间过后目标值将正好达到匹配:包含有积分项的系统被称为无差系统。 |
|
|
| | | | |
<page 12>
1.3.5 Combining the Factors
A well-designed control system reacts quickly to perturbations without excess overshoot or undershoot and exhibits a small static error. However, it is important to
understand the necessity of tradeoff between precision (small or zero error) and
stability (overshoot amplitude). Addressing this dilemma is partially obtained by
combining the above functions through a PID block, where the specific coefficients
kd
, kp
and ki
are individually tweaked to reach the desired performance.
This combination appears in Figure 1.13. We can clearly see that the control
voltage v
c
is actually the sum of all blocks outputs:
1.3.5 结合以上要素
一个设计良好的控制系统,可以无过度过冲或下冲地快速响应扰动,且静态误差较小。然而很重要的是知道对两者进行权衡必要性:精度(较小误差或0误差)和稳定性(过冲幅值)。解决这个难题的方法是通过一个PID框结合以上功能/函数,分别调整指定系数kd、kp、ki从而达到想要的性能。
如图1.13所示为3者结合。可以清晰的看到控制电压vc为3个框输出的总和:


The fine tuning of each individual coefficient is beyond the scope of this book.
However, for the vast majority of power converters (linear or switching), this individual tuning is not directly performed by the designer. Rather, the designer will
indirectly control the derivative and integral terms by respectively positioning zeros
and polesin the compensator transfer function to match certain design criteria such
as crossover frequencyand phase margin.
各系数较好的协调调整超出了本书的范围。对大量的功率变换器(线性电源或开关电源)而言,设计者并不会直接地调整各个系数。当然了,设计者会通过指定校正器传递函数的零点和极点间接地控制微分和积分项,从而匹配某一设计标准,如穿越频率和相位裕度。
It is worth noting that a designer can also favor a term in particular, or two (PI
or PD). For instance, it is very possible to stabilize a converter with a proportional
term or an integral term alone. Power factor correctors are often designed with a
simple integrator in the return chain. We will come back in greater details on this
PID type of compensator in Chapter 4.
值得注意的是设计者也可能更青睐某一项,或两项(PI或PD)。例如,很有可能只用一个比例项和一个积分项来稳定变换器。功率因数校正器常常被设计为反馈链中仅有一个积分器。我们将在第4章回到关于PID类型的校正器的更多细节上来。 |
|
|
| | | | | <page 13>
1.4 Performance of a Feedback Control System
As control inputs and perturbations can be arbitrary by nature, it is extremely difficult to assess the performance of a control system if you ignore the input signal or
the perturbation shapes. Furthermore, a control system can cross various operating
modes within which its output must stay within known boundaries. These modes
can be transient or steady state (i.e., permanent) and must be separately studied to
predict the output variations in a variety of situations. In practice, designers judge the performance of a feedback control system based on its response to a set of test
waveforms. There are several of them: the step, the ramp, the Dirac impulse, and
the sinusoidal stimulus. As they are among the most commonly used during the
analysis of a power converter prototype, we will only look at the step and the sinusoidal input. However, before exploring these signals, it is important to understand
the differences between the terms transient and steady state.
1.4 反馈控制系统的性能
因为控制输入和扰动本身可能是任意变化的,如果忽略掉输入信号和扰动的形状,评估控制系统的性能是非常难的。除此之外,控制系统可能跨越不同的工作模式,其输出必须处于已知的边界内。这些模式瞬态,也可以是稳态,必须分别地研究从而预测各种情形下输出变化。事实上,设计者是根据控制系统对一系列测试波形的响应来判断其性能。这些测试波形包括:阶跃信号,斜坡信号,单位冲激信号,正弦激励信号。然而,在探索这些信号之前,很重要的是弄清这两个术语——瞬态和稳态。
1.4.1 Transient or Steady State?
In electrical or electronic systems, the term transient designates a period of time
during which the system under study is not at its equilibrium state. For instance, it
can be the time necessary to let the system start up and reach its nominal output.
When you first power up a 5 V converter, all capacitors are discharged, and its output starts from zero and then rises toward the expected nominal value. Further to
a certain time designated as a transient mode, the output stabilizes to the regulated
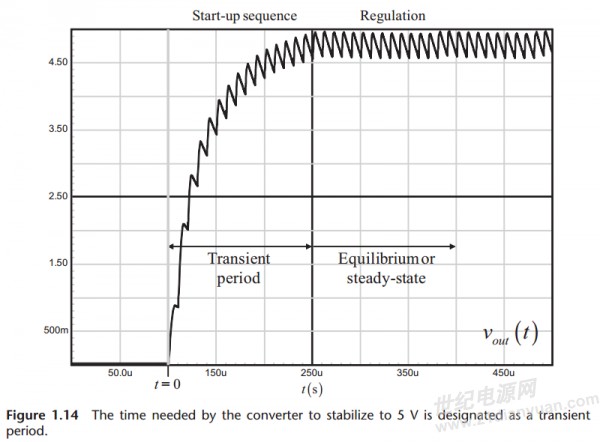
value: the converter is in steady-state operation. Figure 1.14 illustrates this event
for a switching converter.
1.4.1 瞬态or稳态?
在电气或电子系统中,术语瞬态指的是研究的系统没有达到平衡稳定的这段时间。例如让系统启动并到达标称输出需要一定时间。当第一次为一个5V的变换器上电时,所有电容都已放过电,它的输出从零开始向着期望的标称输出上升。经过一段称为瞬态模式的时间后,输出稳定为被调节值:变换器处于稳态工作。图1.14说明了开关变换器的这种动作。
A transient event can also be seen as a sudden change that makes the system
deviate from its equilibrium state: (e.g., the load is steady at 100 mA and you suddenly increase it to 1 A). Observing the output of the converter while this sudden
change is applied will give you information on its transient response.
瞬态动作也可以被视为使得系统从它的平衡稳定状态脱离的突然改变:(例如,负载稳定在100mA,突然将其增加到1A)。当存在突然改变时,观测变换器输出将会得到瞬态响应的相关信息。
During a transient period, the system crosses highly nonlinear states and can no
longer be approximated to a linear system for its analysis. The transient response of
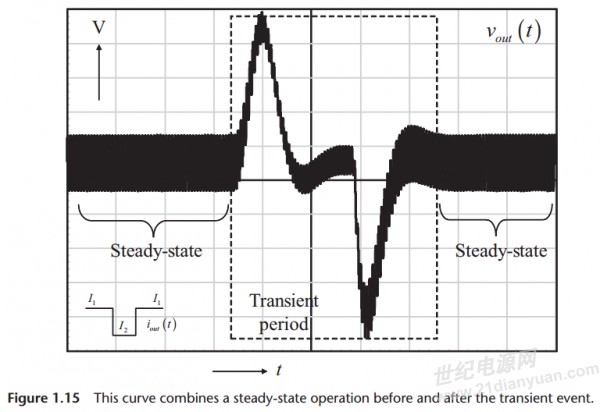
a converter tells you a lot on the way it has been compensated and will be explored in Chapter 2. Figure 1.15 depicts the typical response of a converter subjected to
a transient load step. As you can observe, the current step has been applied after
the converter reached equilibrium. The response of Figure 1.15 is typical of a good
design: the output slightly deviates from the target and comes back quickly without
overshoot or oscillations.
在瞬态过程中,系统跨越高度非线性状态,不能再将其近似为线性系统进行分析。变换器的瞬态响应会揭示许多关于变换器校正的方式,这个问题将在第二章中探索。图1.15描绘了变换器在承受了瞬时负载阶跃时的典型响应。如你所观察到的,在达到平衡稳定状态后,变换器负载电流阶跃变化。图1.15中的响应式一个典型的良好的设计:输入轻微的偏离目标值,然后很快地回归,且无过冲和振荡。
|
|
|
|
|
| | | | | | | 帮多少是多少吧。。。
487页:
第九章
测量和设计实例
既然我们已经知道需要补偿器的原因并且知道如何去设计它,那么将我们所掌握的理论拿去和实物进行测量,进行比较验证,就显得十分重要。如果测量结果和我们的理论模型不符,那么我们需要知道这些误差的起因以及如何使用测量结果去校正理论模型。我们来从基础学起:如何打开一个实物中的环路并且测量其参数。
9.1 测量控制系统的传递函数
在求出稳定控制系统的过程中,我们将注意力放在开环传递的增益分析上。不过当一个控制系统处于正常工作的时候,很明显它是闭环的。因此要验证我们的理论分析,我们需要一种实用的方法来打开环路并重建用来分析的从输入u到输出y的开环模型。 打开环路有很多办法,其中两个参见图9.1.
当然这些只是一些框图。在这里我们需要比这些框图更接近实际的模型,参见图9.2。这个模型里有一个基于运放的补偿器,其输出差值电压Verr驱动着控制着功率级的输入Vc。 这个功率级可以是线性的也可以是开关的,在这里并不重要。这个控制环路可以在运放的输出打开,或者也可以在电阻分压的反馈路径打开。不管在哪里打开环路,一旦环路被打开,那么反馈回路将会被打断,整个控制系统将不会正常工作。
我们将环路打开事出有因。比如你刚刚开始这个方案,但这个方案没有小信号模型等分析模型,那么你就需要测出这个方案的传递函数以便于后续的分析调试。比如在这种情况下你需要根据测得的伯德图 H(s),预定的交越频率和相位裕度来决定补偿器的结构。在这里我们可以首先不考虑差值放大器,而是先专注功率级的扫频结果。这就是第一种我们即将要介绍的方法。
第二种,也是最常见,最实用也最好的方法,就是在环路里插入一个并着变压器的低阻值的电阻,这样这个低阻值电阻可以维持环路的闭环状态,从而保持着DC工作点(注:比如环路维持着输出电压在设计值上)。而用来分析的AC信号可以通过变压器注入。通过这种办法,我们能一石三鸟的获得电源传递函数H(s),补偿器传递函数G(s),以及整个开环增益 T(s)。如果没有这种办法,那么分析环路增益,分析H和G的联合传递就变得十分困难,而且控制系统就很可能无法维持在一个安全和线性的状态下。在注入AC信号的时候,控制系统必须保持在一个线性的状态下从而避免失真(比如,如果注入幅度太大,大到接近的动态的输出极限的时候,就会导致限幅失真)。分析的时候同时也需要注意环路也要工作在安全的范围里,当环路处于最小控制输出的时候,这时候也许是对应着零电压输出,这一般不会的导致太大的问题,但如果环路处于最大控制状态的时候,也就是对应着最大输出的时候,这有可能会产生危险(注:比如输出电压大大超过输出电容的最大耐压的时候)。因此用第二种办法是避免以上问题的常用手段。
|
|
|
| | | | | | | | | 翻译是一项很费脑力的工作,这里先赞一下51楼。
以下对译文有一些商榷,纯属学术探讨,如有不当欢迎指正。
部分译文可能已偏离了原文,略举两例:
原文一:how to open the loop on a prototype and measure the loop gain characteristics
译文:如何打开一个实物中的环路并且测量其参数
分析:这里 prototype 的意思是“原型”俗称“样机”,open the loop 意思是断开环路,loop gain characteristics 是环路增益特性
所以这样译可能更与原文意思更接近:如何断开一个样机的环路并测量其环路增益特性
另外译文中很多处的“打开环路”用“断开环路”应该更贴切。
原文二:There are plenty of places in the control system where the return path can be broken.
译文:打开环路有很多办法
这样译可能更好:控制系统中有许多返回路径可以被断开 |
|
|
| | | | | | | | | | | 1、[size=14.399999618530273px]怎样去断开样机中的环路,并测量环路增益特性
2、在[size=14.399999618530273px]控制系统中,有许多地方,那儿返回路径可以被断开。 |
|
|
| | | | | | | | | | | | | 楼上的译文很好。可见译文是要反复推敲的。
顺便说说,在电路里 open和 close 与中文的意思正好相反,英文的 open 是断开的意思,如译成打开则意思就反了,比如中文的“打开电源” 就是接通电源,open circuit 就是开路。同理,中文说关闭电源就是断开电源,而英文的close是接通,因此如将 open the loop 译成打开环路则意思便不甚明了。 |
|
|
| | | | | | | | | | | | | | | 那这个“open the door",怎么翻译呢?
|
|
|
|
| | | | | | | | | | | 哈哈,多谢指教,比起像CCTV6那样生硬的译制片来个人倾向于意译,open在打断和打开两个之间我也犹豫了半天,考虑到法国人的英语以及上下文的附图,还是选择了打开。有一些废话你可以看到会一笔带过而不会去扣里面的每一个词,大家都忙,我只能也帮楼主稍微尽一些力吧 |
|
|
| | | | | | | | | | | | | 很多情况下确实需要意译,但我觉得意译也是需要忠于原著的,比如:
原文是: “Not only you will get the plant transfer function H(s)”......
译文是:我们能一石三鸟的获得电源传递函数H(s)......
这里“电源传递函数” 可能意译错了。
|
|
|
| | | | | | | | | | | | | | | 不妨参与进来,发挥你的英语特长,选定一章,译成中文,造福大众。 |
|
|
|
| | | | | | | | | P488,489
9.1.1在丢失偏置点的情况下打开环路
上及,当一个控制环路被打开的时候,这个控制系统明显会受到影响。我们如何在前馈或者反馈路径被打断的情况下维持系统的工作偏置点呢?比如在分析一个48V输入,12V/1A输出的变换器的时候,如果控制环路被打开(注:不完全工作),那我们就得在功率级加上一个偏置,这样变换器才能在输出正确的额定电流和电压。在DC工作点处于偏置情况下,我们就可以边向控制环路里注入一个AC信号并且观察输出情况。AC信号注入可以通过一个AC耦合电容来完成。比如我们在用图9.3所示的第一种方法。里面由电阻分压器不仅向(功率级)控制输出提供一个偏置,而且为AC注入所用的耦合电容提供阻抗。在这个例子中我们需要400mV的偏置。如果(不通过电阻分压)而直接用一个DC电压源来提供这个偏置的话,你很可能会发现(电压源上的)粗调旋钮很难调到正确的偏置电压上(注:鬼头们毛手毛脚的人多,这种细活可能不太适合他们),再加上开关电源本来就是个高噪音的地方。最好的办法就是用电阻分压来完成DC偏置。首先,加在靠近控制输入端的1k下拉电阻,能确保一个比较低的驱动电阻,而且能提高对噪音的抑制能力。其次,我们不是(在没有电阻分压的情况下)直接调节电压源以输出400mV的偏置电压,而是通过一个47k电阻调整外置电压源知道变换器的输出达到12V,这样使用电阻分压的方法能给我们一个更细的调整。而且,来自于外置电压源的噪音也会被电阻分压器按照分压比例同样的衰减掉。
当变换器达到12V,1A的输出状态时,我们就可以将AC信号源接到AC耦合电容上并开始注入信号。这个AC信号源一般是来自于网络分析仪的输出。很多制造商有生产这样的仪器,比如Ridley Engineeing, Venable Insturments 或者 Omicron Lab.这样的仪器一般有两个输入,A和B。输入A接到我们注入的AC扫频信号,输入B用来观察输出信号。 例如图9.3里,我们想要得到目标传递函数H(s),A连接到变换器的控制电压,B用来采样输出数据,那么网络分析仪得出的结果就是 (公式9.1)。
为了从高噪音的环境里得到足够的有效信号(信噪比),注入信号必须足够高,然而变换器应该工作在小信号范围内。要验证是否工作在小信号范围内,可以用示波器观察变换器的输出的同时,调整注入信号的幅度,来获得最小的输出失真(没有削波失真)。我们不需要调到最大输出,一般注入的AC信号,在输出上能占到输出电压的1%到5%就可以了。让我们看看一个实例。 |
|
|
| | | | | | | | | | | P490
图9.4是一个基于高压控制器NCP1200的隔离反激电源。控制环路在反馈脚处被断开(光耦被断开),然后我们通过R7和R8来施加一个外置的DC偏置。AC信号由隔直电容C4注入。第2脚,也就是NCP1200的控制电压Vc,实际上直接接入网络分析仪的输入A。二次侧的电源的输出接到网络分析仪的输入B。
在分析高压变换器的时,有几个要注意的问题:
-变换器接入电网的时候会带有致命高压。为了防止触电以及防止和仪器的测量地形成回路,我们在变换器和电网之间加入隔离(注:很多非隔离的示波器等仪器,BNC外圈直接接入地线,不要以为把地线拔了你就安全了)。这个隔离可以使AC或者DC的,总之和电网隔离了就好。一般来说我们用一个(隔离的)外置高压DC源。作者用Xantrex xxxx很多年了,感觉用来做这种测量很得心应手。(you can safetly clamp it's ....这句没懂,作者推荐的这电源,输出到安全外壳应该是可以承受+/- 600v的)并且这个电源可以调整限流大小从而能减小炸鸡时候的损坏。
P491
-这个电源是个光耦隔离电源,但是在测量的时候我们必须把初次级的地接到一起。图9.4里标出了这个短接线。现在你应该能更好的理解为啥我们在电网和电源之间加入隔离是非常必要的。
-在变换器上电之后不能才将网络分析仪接入(C4上),因为此时C4是没有电荷的,突然将其接入,短暂的充电电流会破坏R7,R8组成的偏置。因此我们应该在变换器上电前就将网络分析仪接好。
-如果可能,最好用电阻来做负载。如果没有那么大功率的电阻,那可以用电子负载,不过要将其调到恒阻值模式,而不是恒流模式。因为我们发现恒流模式经常会导致奇怪的结果。
那么,当一切就绪,所有的东西都正常工作的时候,你应该就可以得到像图9.5所示的结果。这个变换器工作在CCM模式,扫频从1Hz起(为得到DC增益)到100kHz,分析仪的过滤器设在1Hz。为了提高信噪比,扫频的AC信号电压从刚开始的100mV调到250mV。在调整这个电压的时候,要注意在噪音减小的同时,不要让输出结果有大幅改变,否则就有可能没工作在线性状态。如前所述,如果你能观察网络分析仪的输入并且防止切顶失真,这就基本能保证是线性状态了。 |
|
|
| | | | | | | | | | | | | (You can safely clamp its output voltage excursion below 400 V)
Clamp -- 钳制,在电路里叫箝位或箝压。例如反激电源中的RCD箝压,见下图:
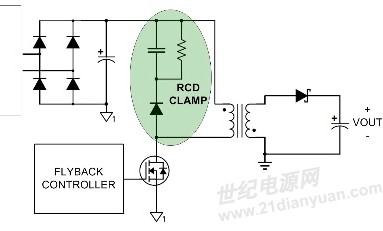
于是整句就可译成:将输出电压的偏移安全地钳位在400V以下。
顺便说一下,如将原文和图片一起贴上则能方便网友阅读。
|
|
|
| | | | | | | | | | | | | | | 谢谢,字面意思当然理解,请你对照仪器的datasheet解释一下这句话说的是什么意思 |
|
|
| | | | | | | | | | | | | | | 你理解错了,我问过作者了,他想说的意思是,可以用这个电源的OVP来将输出钳制在比如400V下。
|
|
|
| | | | | | | | | | | | | | | | | 应该没有什么错,特意看了一下说明书,这仪器是个隔离型的直流电压源,最大输出电压电流可设定。
比如你将该直流电源的输出电压设定到300V,并用此电压来调试电路,而将OVP电压为400V,由于某种原因该300V出现了偏移,假如向上偏移,则其最多只能偏移到400V,被OVP功能限制,这就是“将输出电压的偏移安全地钳位在400V以下”
如理解不当还望指正
|
|
|
|
|
|
|
|
| | | | | 这帖子不但可以了解自动控制,还可以学习英语翻译!!!!!太好了!!!!强烈支持 |
|
|
|
| | | | | <page 14>
Steady stateis the time that the system under study is considered to be at equilibrium: the output has reached a stable operating condition from which it does
not deviate. As we will later see, a harmonic analysis can be carried out once the
converter reaches steady state. The injected signal perturbs the converter around
its operating point. Also called bias point, it is a working point at which you study
the converter. For instance, when you specify a Bode plot or a small-signal analysis,
you must indicate the operating conditions at which these data were captured (e.g.,
Vin
= 20 V with an output voltage of 5 V delivering 2 A). Further details of the bias
point include the duty ratio, the error amplifier output level, and so on. It is important to check these data in a simulation as they indicate a correct dc analysis prior to
running the ac sweep. Then, as the deviation brought by the injected harmonic signal around this bias point is small, the converter keeps operating in a linear r egion,
and its response can be analyzed. This is called small-signal analysis.
稳态是所研究的系统被认为处于平衡稳定的这段时间:输出到达一个稳定的工作状态,也不会从该状态偏离。正如稍后我们将看到的,一旦变换器到达稳定状态,就可以进行谐波分析了。注入信号在变换器(静态)工作点小范围内干扰变换器。工作点也称为偏置点,所研究的变换器正运行于该点。例如,当指定伯德图或小信号分析时,必须指明获取数据的工作条件(例如,Vin=20V,输出5V、2A)。有关偏置点更深的细节将包含占空比、误差放大器输出值等等。仿真时核查这些数据是非常重要的,因为它们可以表明在运行交流扫描前已经有了正确的直流分析。此外,因为由偏置点小范围内注入的谐波信号引起的偏差很小,所以变换器工作于线性区,则可以分析其响应。这称为小信号分析。
When working with switching converters, observing the current flowing in a
capacitor instructs you whether the converter is in steady-state or still in a transient
mode. After the converter has stabilized and provided that no external excitations
are applied, the time-averaged current in any of the capacitors used in the system
must be exactly zero. The same observation can be applied to any inductor where
the time-averaged voltage across its terminals must be zero at steady state. Deviations from these values indicate that the converter is not in steady state, suffers
instability, or undergoes an ac sweep.
当处理开关变换器时,观察流入电容的电流,可表明变换器是工作于稳态还是仍处于瞬态。在变换器稳定后,如果没有加入外部激励,系统中所有电容的平均电流必须正好为0。同样也可以观察所有电感,稳态时它两端电压的平均值必须为0。如果不等于0,表面变换器并未工作于稳态或不稳定或正在执行交流扫描。
|
|
|
| | | | | <page 15>
1.4.2 The Step
A step function, also named a heaviside function, is a mathematical function whose
amplitude is zero for 0 t< and equals a constant value for 0 t³ . In a closed-loop system, the control input is rarely zero at rest. It can rapidly change from one constant
value to another one (for instance, to correct a sudden perturbation). When you
study a voltage regulator, the control input is a fixed scaled-up reference voltage Vref
you want to replicate on the output (e.g., a 2.5-V reference voltage used to build
a 12-V regulator). The perturbations, in this case, are the input variables that can
change the operating conditions of the system: the input voltage or the output current. Any of them can thus be stepped to test the system response to a perturbation
such as an output current change. Figure 1.16 shows an example where the output
voltage of a converter, v
out
, has been subjected to a steep output current increase.
1.4.2 阶跃
阶跃函数,也称为海维赛德函数,该数学函数在t<0时,幅值为0;而在t>0时,幅值为一个常数值。闭环系统中,控制输入几乎不会一直为0。它有可能从一个常数值迅速的变化为另外一个常数值(例如,为了校正突然出现的扰动)。当研究一个电压调节器时,控制输入为一固定的、对参考电压Vref按一定比例放大的的电压,参考电压即是你希望在输出复现的电压值(如2.5V的参考电压被用来建立一个12V的调节器)。在这种情况下,扰动就是能改变系统工作条件的输入变量:输入电压或输出电流。因此,两者均可以按阶跃变化来测试系统对扰动的响应,例如输出电流变化。图1.16例子中描述了变换器输出电压,vout,承受了输出电流急剧上升。
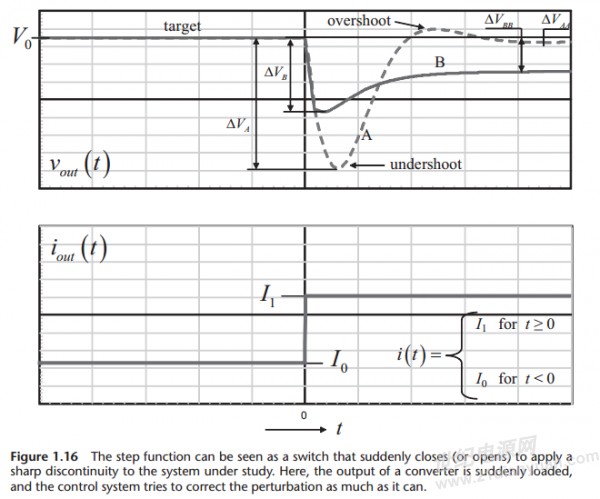
As Figure 1.16 illustrates, stepping the output of two converters A and B via a
current source (or using a resistive load with a switch) displays various things on
the performance of these converters and also on the internal loop implementation
of their respective control section. Both converters deliver an output voltage of V0
when loaded by a current I
0
. When the current is increased to I
1
, converter A output severely dips by a voltage A V D . We say the output undershoots, meaning that
it passes momentarily below the regulated output level. Then, it recovers by going
up quickly, exceeding the output—the system now slightly overshoots—before it
stabilizes to V0
, missed by a very small deviation of AA V D amplitude: this is thestatic e rrorthat the system cannot correct. We will later see that a system affected
by a large open-loop gain exhibits a very small static error. This theoretical error approaches zero when an integral term (i.e., a pole placed at the origin) is inserted in
the control loop. On the second converter, the undershoot B V D is smaller than that
of converter A but the static error BB V D is larger, almost 10 times the previous one.
This teaches us that converter B has a lower gain than converter A, hence a larger
static error. As observed, the lower gain system does not generate an overshoot.
如图1.16图示说明,两个变换器A和B的输出通过电流源阶跃变化(也可以使用带有开关的阻性负载),显示出两个变换器的性能差别和各自控制部分内部环路实现的差别。当负载为电流I0时,两变换器都传递输出电压V0。当电流增加为I1时,变换器A输出电压严重下陷ΔV。我们称输出下冲,意味着输出电压短暂地低于被调节电压值。然后它快速地上升恢复,在它稳定回V0之前,超出了输出电压,出现轻微过冲,且减小了很小的ΔVAA的幅值:这是系统无法校正的静态误差。稍后我们将看到,开环增益大的系统,静态误差很小。当积分项(例如,位于原点的极点)插入控制环中,理论上误差将接近0。第二个变换器,下冲ΔVB比变换器A小,但是静态误差ΔVBB更大,几乎10倍于变换器A。这让我们明白,变换器B的增益低于变换器A,因而静态误差更大。正如我们观察,低增益的系统,没有产生过冲。
|
|
|
| | | | | <page 16>
1.4.3 The Sinusoidal Sweep
The sinusoidal stimulus offers an alternative to the input step for studying control
systems. A sinusoidal signal is used to reveal the transfer functionof a given system
by ac-sweeping one of its inputs while observing one of its outputs. However, as the
transfer function study concerns the output response to one particular perturbed
input, the other inputs must be biased at a steady-state level during the sweep. For
instance, in a converter, the inputs can be the supply voltage, the output current i
out
,
or the control pin nc
. If you study nout
to nc
, then the output current and the input
voltage are frozen during the ac sweep. A signal of constant amplitude is injected
into the selected input and its frequency varied from a starting value (e.g., 10 Hz)
to a stop value (e.g., 100 kHz). At each frequency step, the output amplitude is
recorded, as well as its phase difference relative to the input. The amplitude of the
injected signal must stay within certain limits, a small-signal analysis, to guarantee the system will not be overdriven and remains in a linear zone throughout the
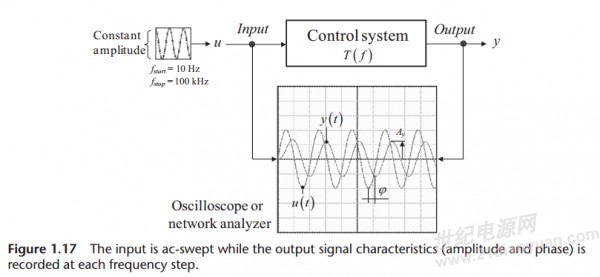
sweep. A possible text fixture appears in Figure 1.17, where an oscilloscope can
either be used to capture the points of interest or to control the linearity of the output signal. At the end of the sweep, we end up with a series of data points containing the input amplitude Vin
(kept constant during the sweep), the output amplitude
(nout
), the phase difference between both signals j, and, finally, the frequency fat
which these points were stored. This series of data points, amplitude phase couples,
are representative of the control system transfer function: when a perturbation or
a control setpoint change occurs, how does it propagate in terms of amplitude and
phase through the system to finally affect the output? This is the answer the study
of the transfer function must give us.
1.4.3 正弦扫描
正弦激励为研究控制系统提供了除输入阶跃的另一选择。正弦信号通过交流扫描给定系统的其中一个输入,同时观察其中一个输出,从而得出它的传递函数。然而,因为传递函数的研究关注的是输出响应特定的扰动输入,因而在扫描过程中,其他输入必须被偏置于稳态。例如,在变换器中,输入可能是供电电压,输出电流Iout或控制脚电压Vc。假如研究Vout对Vc的响应,输出电流和输入电压在交流扫描过程中必须被固定。一个幅值不变的信号被注入到所选输入,且他的频率从一个起始值(例如,10Hz)到一个终止值(例如,100kHz)。在每一个步进的频率点上,其输出幅值和相对于输入信号的相位差被记录。注入信号的幅值必须处于一定的限制以内——小信号分析,从而保证在整个扫频范围内,系统不会被过度驱动,并处于线性区域。如图1.17为一种可行的测试装置,其中示波器既可以捕获我们感兴趣的点的波形,又可以控制输出信号的线性。扫描结束后,我们得出一系列数据点,包括振幅Vin的输入(在扫描过程中保持幅值恒定)、输出幅值(vout)、两信号间的相位差ψ和这些被记录数据点的频率。这一些列的数据点,幅值相位关系,代表控制系统传递函数:当出现扰动扰动或控制给定突然改变,就相位和幅值而言,它怎样通过系统传递,最终影响输出?研究传递函数会给我们答案。
|
|
|
| | | | | <page 17>
1.4.4 The Bode Plot
The most common way for plotting the transfer function is to display the magnitude of the ratio out in VVversus frequency in one graph, while the phase versus
frequency appears in a second graph. However, as both the ratio and frequency
variations can be quite large, it is usual to logarithmically compress the xand yaxis.
The final representation becomes a so-called Bode plot, after H. Bode, an American
engineer working at Bell Labs in the late 1940s. Such a plot is made of two graphs,
magnitude and phase, sharing a common horizontal axis graduated in hertz (the
log-compressed swept frequency). The upper graph (the magnitude curve) has a
vertical scale graduated in decibels (dB), whereas the lower graph simply displays
the phase difference in degrees.
1.4.4 伯德图
描绘传递函数最常使用的方法是在一张图表中画出Vout/Vin的比值随频率的变化,同时在另一张图表中画出相位随频率的变化。然而因为比值和频率变化可能非常大,所以通常使用取对数方式压缩x和y轴。在H.Bode——一位20世纪40年代后期在贝尔实验室工作的工程师——之后,最终由一种所谓的伯德图来作为代表。这种图形由幅值、相位两个图表构成,它们共用一个标注Hz的横轴(以对数方式压缩的扫描频率)。处于上方的图表(幅值曲线)纵轴标注为分贝(dB),而下方图表仅列出标注为“度”的相位差。
The decibel, one tenth of a bell, is a logarithmic unit of measurement commonly
used to express the magnitude of a physical quantity (power or current intensity, for
instance) relative to a reference level. For instance, when two power levels, P1
and
P0
, need to be compared, the following formula can be used:
分贝,十分之一贝尔,是一个用于度量的对数单位,它常用来表示一个物理量相对于另一个参考值的大小。例如,当需要比较两个功率等级时P1与P0时,可以使用下面的公式:

If a power source P0
of 10 W is chosen as the reference and you measure a second source P1
of 30 W, you would say that P1
is larger than P0
by 4.8 dB or P0
is
smaller than P1
by –4.8 dB.
假如10W功率源P0被选为参考,而测得另一个30W的功率源P1,那么可以说P1比P0大4.8dB,或P0比P1小4.8dB。
In our case, as we want to compare input and output voltages, the output of
our control system to its input stimulus, the formula needs revision. Going back to
(1.13), if we consider that power levels P1
and P0
are obtained by two rms voltages
V1
and V0
applied across a common resistor R, then the ratio of powers could be
reformulated as follows:
因为我们的问题是要比较输入与输出电压——控制系统的输出电压对其输入激励,所以公式需要修正。回顾式(1.13),如果我们认为功率值P1和P0由加在相同电阻R的两个有效值电压V1和V0获得,那么功率比值可写为如下新的式子: 
To draw the magnitude curve of our Bode plot, we will simply apply this formula to the collected data points:
为了画出伯德图的幅值曲线,我们仅对采集的数据点应用该公式:

For every frequency step, you will thus record and compute the magnitude in
decibels plus the phase difference between both input/output signals. Once this
information is graphed, you obtain the Bode plot as shown in Figure 1.18 for a
first-order system. What kind of frequency step must we select? Usually, to avoid
ending up with too many data points, it is recommended to take around 100 points
per decade (e.g., 100 points between 10 Hz and 100 Hz and so on). However, if
sharp peaks must be observed, there are chances that the 100 points are scattered
and the resonance can be masked. In that case, it is recommended to increase the
amount of points to, let’s say, 1000, to the detriment of the sweep speed of course.
By the way, if we take 100 points per decade, what is the resolution of a step then?
If we start from f
start
, the next point will be 2 start ff x =×where xis the ratio increase
between the second starting point and the starting point. The third point will be at 3 startstart ffxx fx =×=×. If we select ndata points, the equation we need to solve
is the following one:
因此,必须记录并计算每个频率点上输入/输出信号间标注为相对幅值大小和两者间的相位差。一旦这些信息被制成图表,就可以获得如图1.18所示的一阶系统的伯德图。我们必须选择什么样的频率步进呢?通常,为避免最终获得太多的数据点,推荐每十倍频程采集100个点左右(例如,在10Hz到100Hz间采集100个数据点,以此类推)。然而,如果需要观察尖锐的峰值,有可能100个点较为分散,谐振点可能会被掩藏。这种情况下,推荐增加采集点数,比如说1000,当然这也会降低扫频速度。另外,假如每十倍频程采集100个点,那么步进值怎么处理呢?如果从fstart开始,下一个点应该是f2=fstart*x,其中x是在第二个起始点和该起始点之间增长的比率。第三个点位于f3=(fstart*x)*x=fstart*x^2。如果选择n个数据点,那么我们需要解的等式如下:

|
|
|
|
|
| | | | | | | | | 其实我每次都是先在word里面翻译整理然后再复制到论坛的!之前也想过直接上传word到论坛,但是想了想不太合适:如果每页一个word,大家看的时候要下载很多,很不方便,如果很多页一个word,我更新时间就比较慢咯,大家看起来也烦,所以…… |
|
|
|
|
|
|
|
|
| | | | | | | | | 只是个人观点。环路控制实质上就是反馈控制,确切一点是负反馈控制。稳压电源的稳压环节(电路)实质上也是一种负反馈控制电路。一般读者对稳压比较好接受,对环路可能就相对陌生得多。 |
|
|
| | | | | | | | | | | 书名原文:DESIGNING CONTROL LOOPS for LINEAR and SWITCHING POWER SUPPLIES
1)原文书名无“稳压”一词,内容也并非针对稳压电源
2)电源有电压源和电流源,控制环路也不一定就是稳压
3)LINEAR and SWITCHING POWER SUPPLIES 分别指线性电源和开关电源
4)没有“线性开关电源”这种东西
5)Loop应译成环路,环路比回路的概念大,环路已是电源行业公认的名称,做电源的应该没有人不知
因此我认为比较合适的译文是:线性电源和开关电源控制环路的设计
|
|
|
|
| | | | | | | 线性电源和开关电源的控制环路设计
线性型和开关型电源的控制环路设计
为线性电源和开关电源设计控制环路
为线性型和开关型电源设计控制环路
……
个人偏向第一个! |
|
|
| | | | | <page 18>
Knowing that, over a decade, f
start
and f
stop
are linked by a ratio of 10, we
have
我们知道,在一个十倍频程范围内,fstart和fstop被一个10的比率连接,所以可以得到:

If we start at 10 Hz to end up at 100 Hz, we have x= 1.02329 or an increase of
2.33 percent between each point. The second point will therefore be at f
2
= 10.2329
Hz, the third at f
3
= 10.4712 Hz, and so on.
如果从10Hz开始到100Hz,那么可以得到x=1.02329或每个点间增长2.33%。因此,第二个点将位于f2=10.2329Hz,第三个点位于f3=10.4712Hz,以此类推。
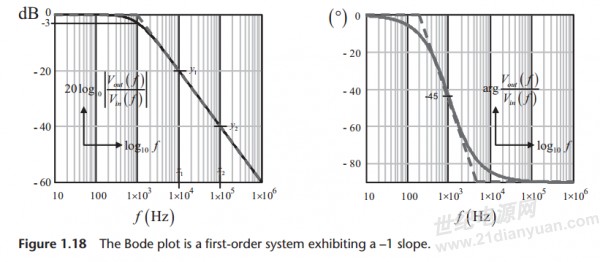
There are several pieces of information you can extract from the Bode plots
represented in Figure 1.18:
The • cutoff frequencyalso called the corner frequencyis the frequency either
below or above which the transfer function magnitude is reduced/increased
by 3 dB. In Figure 1.18, we can see that the magnitude is flat in the low frequency area and falls by 3 dB at 1 kHz.
The cutoff frequency of this first-order system is also the frequency for which •
the phase lag between the output and the input is 45°. It would be 90° for a
second-order system.
The slope of the magnitude curve is classically given by the vertical displace- •
ment divided by the horizontal displacement. In other words,
从图1.18绘出的伯德图中可以提取出几则信息:
* 剪切频率,也称为转折频率,是传递函数幅值减小或增加3dB时的频率。在图1.18中,我们可以看到,在低频区域幅值平坦,而在1KHz时下降了3dB。
* 一阶系统的剪切频率也是输出与输入之间相位滞后45°时的频率。对二阶系统是90°。
* 幅值曲线的斜率由典型地方法获得——纵轴位移除以横轴位移。也就是说,

By looking at the graph, for a frequency decade between two points x1
and
x2
, we read that a 20-dB magnitude difference links y
2
and y
1
. In other words,
using (1.15), 210.1 yy= . Given the decade between x1
and x2
, we have 2110 xx= .
Updating (1.18) with these definitions, we have
通过观察该图表可知,对于在x1和x2两点间的一个十倍频程,y2与y1间的幅值差为20dB。换言之,由(1.15)式可得:y2=0.1y1。考虑到x1和x2之间为十倍频程,可得:x2=10x1。用这些确定的参数修正(1.18)式,可得:

When using linear-logarithmic (lin-log) scales for the vertical and horizontal
axis, it is possible to draw the ac response through asymptotic curves. These curves
for both the magnitude and the phase represent a template made of straight lines.
In Figure 1.18, we can see the magnitude and phase response of the following firstorder transfer function:
当对横轴和纵轴使用线性化的对数缩放后,就可以通过渐近线绘出交流响应。对幅值和相位而言,渐近线代表了一个由直线组成的样板。如图1.18,我们可以看到下面的一阶传递函数的幅值和相位响应:
 |
|
|
|
| | | | | <page 19>
For frequencies well below the pole position (1 kHz), the magnitude curve is
almost flat and can be represented by a straight line up to that point. Beyond, the
magnitude decreases following a negative slope of –20 dB per decade, also called a
–1-slope, as given by (1.19). The phase follows almost the same scenario: 0° well
below the cutoff frequency and then lags down to 90° when the frequency is far
beyond this value. It is usual to draw a 0° flat line up to one fifth of the cutoff point
(200 Hz in our example). A falling line then joins a –90° point placed at five times
the cutoff value (5 kHz). They are represented as dashed lines in Figure 1.18. As
you can see, the magnitude and phase curves deviate from the asymptotes at the
corner points. The deviation values at various observation points can be computed
as described in the various references given at the end of this chapter.
对于远远低于极点位置(1kHz)的频率,幅值曲线几乎是平坦的,可以用一条一直到达该点的直线来代表幅值曲线。超过极点频率后,幅值按-20dB/十倍频程的负斜率下降,由式(1.19)式可知,该斜率也称为-1斜率。相位也按照相同的情形:远远低于剪切频率时,相位为0;当频率超过该值时,相位延迟达到90°。通常会画一条0°的平直线一直到剪切频率点的1/5(在此例子中为200Hz)。然后,从该点开始,一条下降的线连接到位于剪切频率5倍频(5kHz)的-90°点。在图1.18中,他们由虚线表示。可以看出,幅值和相位曲线在转折点处偏离渐近线。在不同的观测点处的偏离值可以按本章结尾处给出的各参考文献的描述来计算。
A first-order system exhibits a down or up slope of 1 or –1, respectively, implying an increase (single zero) or a decrease (single pole) of 20 dB per decade of frequencies. For a second-order system, this slope becomes 2 or –2 (–40 dB per decade)
depending if the magnitude increases (double zero) or decreases (double pole) as the
frequency is swept.
一阶系统呈现出1或-1的斜率上升或下降,分别意味着20dB/十倍频程的增加(单零点)或减小(单极点)。对二阶系统,当扫频时,根据幅值增加(双零点)或减小(双极点),斜率变为2或-2(-40dB/十倍频程)。
1.5 Transfer Functions
A control system is characterized by the relationship relating its output, y, to its input u. As our input signals are arbitrary by nature, the time-domainanalysis offers
a known means to study a control system: if, over time, the input u(t) changes by a
certain amount, how does it affect the output y(t)? Performing this study requires
the usage of differential equations. A differential equation uses the notion of derivative, a mathematical tool that measures the rate of change of a function when its
input varies by a certain quantity. For instance, in the time-domain equation (1.4),
we state that the current inside the capacitor depends on the time-derivative of its
terminals voltage (actually the slopeof the voltage applied on the capacitor) and the
capacitor value itself. This equation is then substituted into (1.3) to form the final
first-order differential equation of the system under study, (1.5). We say first order
because we only differentiate once in relationship to a time interval, dt. Should we
need to differentiate twice, implying a variable affected by the slope of the slope,
dt, we would have a second-order system. Generally speaking, the order of the
equation depends on the number of distinct energy storage elements present in the
circuit. Should you have one inductor and two independent capacitors (not in parallel or series), this is a third-order equation or a third-order system.
1.5 传递函数
控制系统的特征是将输出y关联到输入u。因为输入信号本身是任意的,时域分析提供了一种大家熟知的方法来研究控制系统:假如输入u(t)随着时间改变了一定量,那么它怎么影响输出?研究需要用到微分方程。微分方程使用到导数的概念,它是一种衡量当输入变化一定量时的函数变化率的数学工具。例如在时域方程(1.4)中,我们阐明流入电容的电流由它两端电压对时间的微分(其实是加在电容上的电压的斜率)和电容自身容值所决定。该方程被代入到式(1.3),从而形成所研究系统的最终的一阶微分方程,式(1.5)。我们称其为一阶,是因为仅需对时间区间——dt,进行一次微分。假如我们需要进行两次微分,意味着变量被斜率的斜率——d(t^2)影响,那么可得到一个二阶系统。通常来说,方程阶数由电路中不同的能量存储元件个数决定。如果有一个电感和两个独立电容(非并联或串联),则可得到一个三阶方程或三阶系统。
|
|
|
|
| | | | | | | 很好,又继续了,楼主辛苦下把94楼重新编辑下,把图补上吧,这样更完美。 |
|
|
| | | | | | | | | 因为排版问题,我一般会把图片放在第一次被引用的地方,以免混乱……比如你说的94楼<page 18>的图片,我已经放在了 71楼<page 17>上,因为<page 17>第一次引用这张图 |
|
|
| | | | | <page 20>
Looking at the output y(t) delivered by these types of equations requires mathematical skills that power electronics engineers, including myself, are often lacking or have forgotten. Rather than solving differential equations, engineers prefer
the Laplace transform. For our usage in electronics, we can say that the Laplace
transform, noted L, is a mathematical tool that converts complex linear differential
equations of any order into a simpler set of algebraic expressions. Once the solution
of these algebraic equations is found, the expression can be transformed back to the
time domain using the inverse Laplace transform, denoted
1 -L .
查看这几类方程所传递的输出,需要一定数学功底,电力电子工程师,包括我在内,通常缺乏或已经忘记这些数学技能。工程师们更偏爱拉普拉斯变换,而不是解微分方程。对我们在电子学中的应用,我们可以说,拉氏变换,标注为£,是一个将任意阶复杂的线性微分方程转换成相对简单的代数表达式的数学工具。一旦获得这些代数方程的解,表达式就可以使用反拉氏变换,标注为£-1,变换回时域。
When used in electrical circuits, the Laplace transform can also be seen as a
tool processing periodic or nonperiodic time-domain functions (e.g., u(t) and y(t))
to map them into a two-dimensional plan, the complex frequency domain. In this
domain, the new expressions, now noted U(s) and Y(s), are a function of a complex
argument sjσ ω =+(also known as pin some countries). The resulting function of
snow features an argument (the phase) and a magnitude (the amplitude).
当应用在电路中时,拉氏变换也可以被视为处理周期或非周期时域函数(如u(t)和y(t))的工具,将它们映射到一个二维平面——复频域。在复频域中,新的表达式标注为U(s)和Y(s),是一个复变量s(在一些国家,也称为p)的函数。得出的s的函数包含一个相角和一个幅值。
ps:本段结尾处使用的几个术语:argument、phase、magnitude、amplitude,特别是后两个,中文先关文献都通常翻译为幅值,实际上有区别的。大家是否知道区别?
The Fourier transform also maps the time-domain function but into a onedimensional frequency domain, w. When a linear system is stable and the initial
conditions are zero, the Fourier and Laplace transforms can be used interchangeably; they give identical results including transient response. When a system is unstable (i.e., it features a pole in the right half plane), the Fourier transform of the
response simply does not exist because the Fourier integral does not converge. The
Laplace integral, with complex frequency sjσ ω =+, can be made to converge because of the presence of σ, which is at the core of making a stability assessment of
a system based on a bounded response. Because part of studying systems is stability
assessment, and not just determination of a response, the Laplace transform is the
appropriate one to use.
傅里叶变换也可以将时域函数映射到一维的频域,ω。当一个线性系统稳定且初始条件为0时,傅里叶变换和拉普拉斯变化变换可以相互地使用;它们给出同样的包含有瞬态响应的结果。当系统不稳定时(例如,它拥有一个右半平面极点),响应的傅里叶变换不存在,因为傅里叶积分不收敛。拉普拉斯积分可以收敛,因为复频s=σ+jω中σ的存在,它是基于有界响应评估系统稳定性的核心。因为研究系统的部分内容就是评估稳定性,而不仅是测定系统响应,因此,使用拉氏变换更合适。
The unilateralLaplace transform, meaning that positive time only, is considered
(the function is said to be causal(e.g., zero before t= 0)) looks as follows:
单边拉氏变换,意思是仅考虑正时间(该函数被称为 因果的(如t=0之前为0)),类似下式:

This equation can be used to find the response of a linear circuit to a nonsinusoidal excitation such as a ramp, a step, and so on. By involving the inverse Laplace
transform on the output equation that is now a function of s, we can reconstruct the
output signal in the time domain. If we are solely interested in a harmonic analysis
in steady state, such as what Figure 1.17 shows, sbecomes a pure imaginary number
equal to jw: wis the signal angular frequency in radians per seconds, or 2pf, with f
being the waveform frequency, in hertz. In this particular case, the mathematical definition of the Laplace transform becomes that of the unilateral Fourier transform:
该方程可以用于求解线性电路对斜坡、阶跃等非正弦激励的响应。对现在已变为s的函数的输出等式,应用反拉氏变换,我们可以在时域中重建输出信号。如果我们仅对稳态下的谐波分析感兴趣,如图1.17所示,那么s变为纯虚数jω:ω是信号角频率,单位为弧度/s,或2πf,其中f为波形频率,单位为Hz。在这种特殊情况下,拉氏变换的数学定义变成了单边傅里叶变换:
 |
|
|
| | | | | <page 21>
In this expression, the term
jt
e
ω -represents a phasor, a reduced mathematical
notation including the amplitude and the phase of a sinusoidal signal. The function
( ) Ujωwill thus carry these characteristics, essential to its description in the complex frequency domain, giving us access to complex parameters such as phase and
magnitude. This tool is widely used in the electronic world and in particular in the
study of control systems.
该表达式中,ejωt代表相量——一个简化的数学符号——包含正弦信号的幅值和相位。函数U(jω)将携带这些对复频域描述所必需的特征,使我们获得复合的参数,如相位和幅值。这个工具广泛应用在电子领域中,尤其是控制系统的研究。
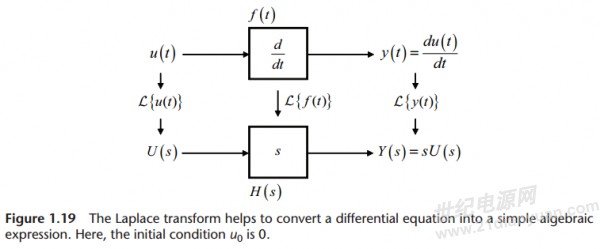
There are several interesting properties of the Laplace transform. Among them,
the derivative or the integral of a function u(t) are respectively transformed into the
Laplace domain by a multiplication or a division by s. The Laplace transform of a
derivative is
where u0
in the expression is the initial state of uat t= 0.
拉氏变换有几个有趣的特性。其中,对函数u(t)求导或积分分别通过乘以或处以s转变到拉普拉斯域中。导数的拉氏变换为:

其中u0为t=0时u的初始状态。
Let’s imagine, as in Figure 1.19, a box taking the time derivative of the input
signal u(t). If we apply a Laplace transform to this expression, considering null initial conditions for u, it becomes a simpler algebraic equation where the multiplication by snow symbolizes the differentiation.
想象一下,如图1.19所示,一个框使输入信号u(t)对时间取导数。就u在初始条件时为0而论,如果对该式进行拉氏变换,即可得到一个更简单的代数式,其中乘以s象征着微分。
When you write that the voltage across an inductor is defined byyou simply write that the voltage across the inductor is obtained by differentiating
its current ILfurther multiplied by the inductor value. In this expression, the term
sLis homogenous to the inductor impedance.
当写出电感上的电压定义为下式时:

也即写出了电感两端电压通过对电流IL微分然后再乘以电感值获得。该表达式中sL项等同于电感阻抗。
The integration follows the same principle and implies a division by s:
积分遵循相同的原理,意味着除以s:

Figure 1.20 illustrates the implementation of this principle using our boxes
a rrangement.
图1.20图示说明了使用框图结构的原理来实现。
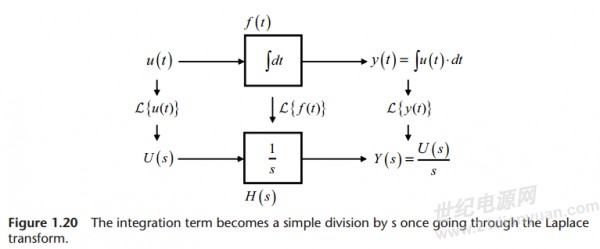
When you write that the voltage across a capacitor is defined byyou simply write that the capacitor voltage is obtained by integrating its current further divided by the capacitor value. In this equation, the term 1sCis homogenous
to the capacitor impedance.
当写出电容上的电压定义为下式时:

也即写出了电容上的电压通过对它的电流积分再除以电容值获得。该等式中,
1/sC项等同于电容阻抗。 |
|
|
| | | | |
<page 22>
1.5.2 Excitation and Response Signals
By looking at Figures 1.19 and 1.20, we can see that a relationship now links the
output Y(s) to the input U(s) in the frequency domain:
This relationship is called the transfer function and is noted H(s) in both
fi gures:
A transfer function is usually expressed by a quotient made of a numerator and
a denominator:
1.5.2 激励和响应信号
通过观察图1.19和1.20,我们可以看到复频域中输出Y(s)对输入U(s)存在一个关系:

这个关系被称为传递函数并在两个图中标注为H(s):

传递函数通常表达为一个由分子和分母组成的商:

For some values of s, this transfer function can either be zero, ( ) 0 Ns= , or can
go to infinity for ( ) 0 Ds= . The rootsof the numerator Nare called the zerosof the
transfer function. The roots of the denominator Dare called the polesof the transfer function. We will see later on that these roots can be real, complex, or purely
imaginary.
对s的一些取值,传递函数可以等于0,N(s)=0,也可以为无穷大,D(s)=0。分子N(s)的根,称为传递函数的零点。分母D的根称为传递函数的极点。稍后我们将看到,这些根可以是实数、复数或纯虚数。
As explained in Dr. Vatché Vorpérian’s book (see the recommended books list),
a transfer function is characterized by an excitationsignal and a responsesignal. In
our previous expressions, U(s) was the excitation and Y(s) the response. Because excitation and response signals can be a current or a voltage, you can easily combine
the variables together, as Figure 1.21 details.
如Vatché Vorpérian博士的书(查看推荐书籍列表)中解释,传递函数的特征由激励信号和响应信号所决定。在前面的解释中,U(s)是激励,Y(s)是响应。因为激励和响应信号可以是电流或电压,你可以简单地组合这些变量,如图1.21所详细描述。

|
|
|
|
| | | | | <page 24>
1.5.3 A Quick Example
The simple RCcircuit of Figure 1.7 lends itself very well to a quick application
example of the Laplace transform. The time-domain equation of the circuit is given
by the following equation:
Considering the capacitor fully discharged at t= 0 (y
0
= 0), we can apply the
Laplace transform to (1.32):
Factoring Y(s) on the left side, we have:
Rearranging, we have the transfer function we want:
图1.7中简单的RC电路非常适合作为拉氏变换的一个简要应用例子。电路的时域方程由如下方程给出:

就电容在t=0已完全放电而论,我们可以对式(1.32)应用拉氏变换:

在式子左边提出Y(s),我们得到:

重新整理,得到我们想要的传递函数:
 This is a typical first-order transfer function. The denominator D(s) equals zero
This is a typical first-order transfer function. The denominator D(s) equals zero
for 1 p sRC =- . This is a negative root, indicating that the pole is situated in the
left-hand portion of the s-plane (see the chapter on poles and zeros). With sequal
to jw, the pole definition is obtained by calculating the magnitude of s
p
:
As 2 f ωπ= , we can easily extract the cutoff frequency equal to:
Substituting (1.36) into (1.35), we obtain a slightly different form, often used
throughout this book and the literature:
If we now replace sby jwand solve for the denominator magnitude, we have:
Therefore, applying (1.30):
When wequals wp
, the magnitude is 12. In dB, this number becomes
这是典型一阶传递函数。对sp=-1/RC,分母等于0。sp是负根,表面极点位于s平面的左半部分(查看关于零点和极点的章节)。当s=jω,通过计算sp的幅值,可获得明确的极点:

因为ω=2πf,我们很容易地提取出剪切频率,等于:

将(1.36)式带入(1.35)式,可得到略微不同的形式,整本书和相关文献中常常使用:

如果我们现在用jω来取代s,并解出分母幅值,可以得到

因此,由(1.30)可得:

当ω=ωp时,幅值为1/√2。用dB来表示,该数值变为:
 |
|
|
|
| | | | | <page 26>
If, rather than assessing each transfer function by its Laplace expression, we
have access to individual Bode plots, then we can capitalize on the following property of logarithms, independent from their definition base:
如果我们可以获得各个伯德图,那么我们可以利用下面的与它们的基本定义相互独立的对数特性,而不是通过拉普拉斯表达式来评估每个传函:
Therefore, if you have individually characterized two cascaded blocks G(s) and
H(s) through Bode plots, applying (1.44) means that you just need to sum the
graphs points by points to obtain the Bode plot of ( ) ( ) ( ) Ts HsGs = .
因此,如果已经通过伯德图分别地描绘了两个级联框G(s)和H(s),由式(1.44)可知,仅需逐点的求出两图的和,即可获得T(s)=G(s)H(s)的伯德图:

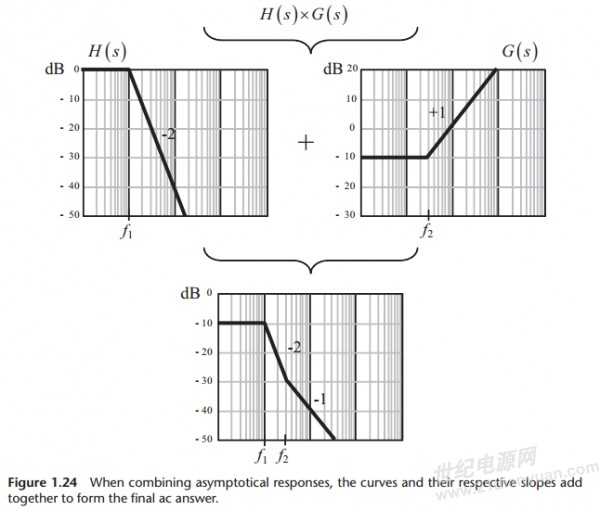
When you consider the slopes, they simply add together as shown in Figure 1.24.
For instance, assume you combine a second-order low-pass filter for H(s) with a
single-zero response for G(s), the second-order filter offers a flat answer until the
cutoff frequency f
1
is reached. At this point, its magnitude asymptotically decreases
with a –2 slope. The second block magnitude starts with a flat 10-dB attenuation
until a frequency f
2
is reached. Beyond this breakout point, the magnitude increases
with a +1 slope. The combination of both frequency responses will simply be that
presented in Figure 1.24 where the +1 slope opposes the –2 slope at the frequency
f
2to form a –1 slope. The phase characteristics of each block are also summed together, although not represented here:
当就斜率而论时,如图1.24所示,简单地将两者相加即可。例如,假定你将一个二阶低通滤波器H(s)和一个单零点响应G(s)相连,二阶低通滤波器在剪切频率f1之前保持平坦。到达改点后,幅值渐近线以-2的斜率下降。第二个框幅值由一个平坦的10dB的衰减值开始,直道频率到达f2。过了该转折点后,幅值以+1的斜率上升。两个传函的的响应结合后将简单地转变为图1.24所描述,其中在频率f2处+1的斜率抑制-2的斜率,从而形成-1的斜率。尽管此处未描述,但两个框的相位特性也是相加:

 |
|
|
| | | | | <page 26>
1.6 Conclusion
This section ends our quick introduction on the control systems field and its associated terminology. In the coming chapters, we will come back to the topics we’ve
tackled in more detail. Needless to say, the domain is vast and will require effort
before mastering it. However, if your interest narrows down to stabilizing simple
to moderately complex linear or switching converters, this introduction should get
you started.
If you are interested by digging further into the domain of feedback and control
systems, the following is a short list of books, articles, and links that will allow you
to strengthen your knowledge in that field. Typing in search engines keywords like
“modern control theory,” “control systems,” and so on will lead you to interesting
websites and papers.
1.6 总结
该部分完成了关于控制系统领域和与其相关的术语的简要介绍。接下来的几章,我们将更详细地回归到已经涉及的主题。毋庸置疑,这个领域是很广泛的,在掌握它之前需要付出努力。然而,如果你的兴趣仅是使简单的或者中等复杂的线性型和开关型变换器稳定,那么该简介将作为开始。
如果你有兴趣更深的探究反馈和控制系统领域,下面是一份简短的书籍、文章和链接的清单,它们将让你加强在该领域的知识。在搜索引擎中输入关键字,如:“现代控制理论”、“控制系统”等,将引导你找到感兴趣的网站和文章。
|
|
|
|
| | | | | ………………………………………………………………
本章结束!
……………………………………………………………… |
|
|
|
|
| | | | | | | 不好意思,前几天太忙了,一直没来论坛……
之前我是打算都写的,但是发现没什么人看!
做个小调查吧,大家觉得是否有必要继续,如果认为有必要的人太少,那后面就不翻译了……
|
|
|
| | | | | | | | | 虽然我看不懂,偶尔也会过来看看的,学习学习专业英语挺不错的
一个人的力量太单薄了,挺你 |
|
|
| | | | | | | | | 必须继续啊,楼主,我一直在关注呢。楼主可以看一下,其实看的人不少,只是都没留言,我估计也是不想打断楼主的翻译,或者是怕中间如果穿插的留言太多使后面的人看起来不连贯。 |
|
|
| | | | | | | | | 楼上回答 很准确,很多人关注的 ,只是默默的听你说,潜水呢,顶楼主 继续。。。。同意的 都来冒个泡吧 |
|
|
|
|
|
|
| | | | | 太伟大了,感谢!!!
楼主现在还在翻译吗?
在期待你的新作! |
|
|
|
|
|
|
|
|
| | | | | | | 为了表示对LZ的劳动的尊重,我愿意有偿购买LZ的中译本。
其实翻译的挺好的,请LZ继续。
|
|
|
|
|
| | | | | 哈哈哈,很有幸看到了此贴,对于楼主的大公无私的精神我表示最高的敬意。
|
|
|
| | | | | 请问这本书翻译的进展怎么样了?现在我们可以下载来看中文版的了吗? |
|
|
| | | | | 请问这本书翻译的进展怎么样了?现在我们可以下载来看中文版的了吗? |
|
|
|
| | | | | Hi,楼主!我恰好九月份翻译了此书的第七章,大概有70张A4纸,还没来得及文字润色!等有空,我来弄一下!可以来群 31770932交流!!! |
|
|
|
| | | | | 建议楼主翻译几章后整理成word或者pdf方便大家查阅 |
|
|







 收藏
收藏 分享
分享


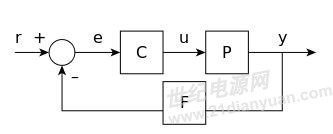
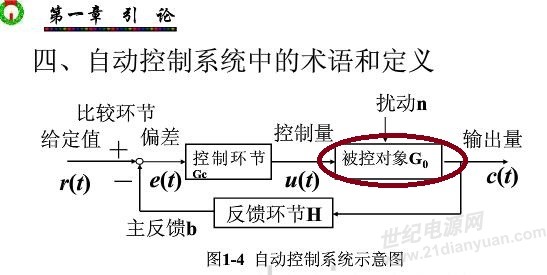
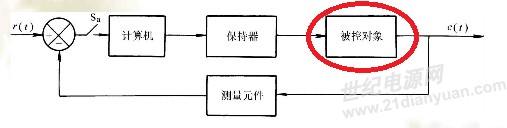
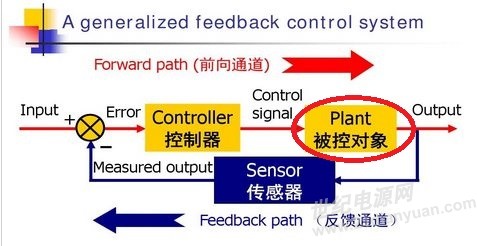
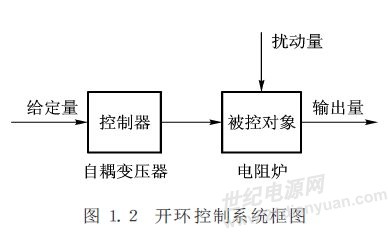





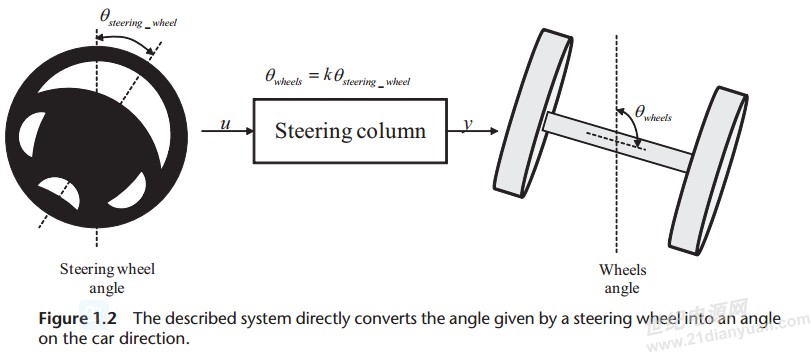
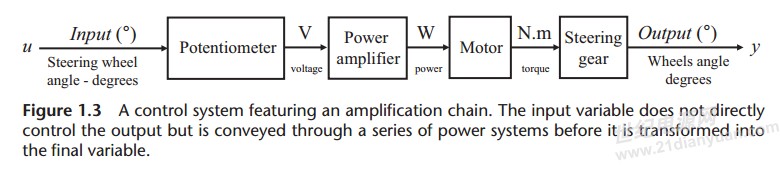
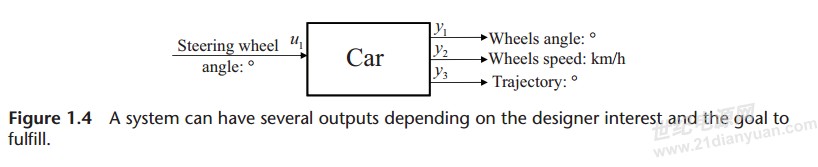
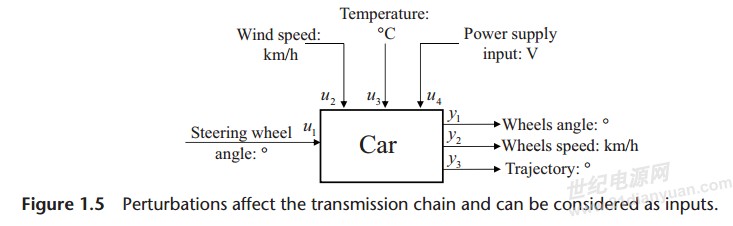
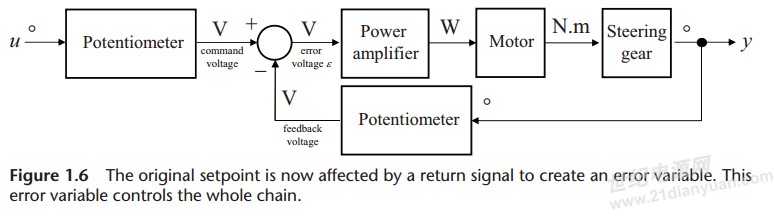
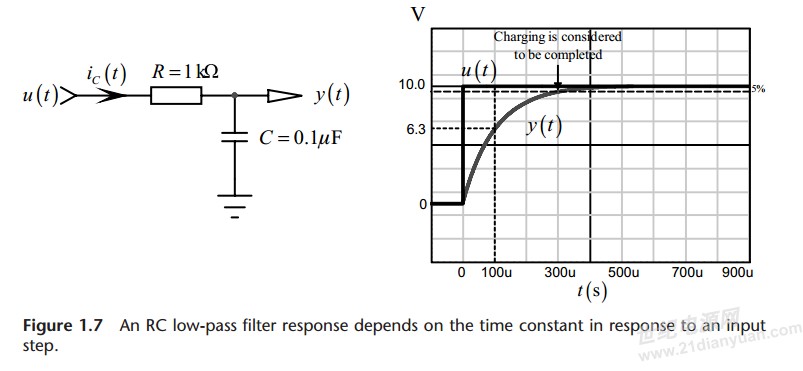
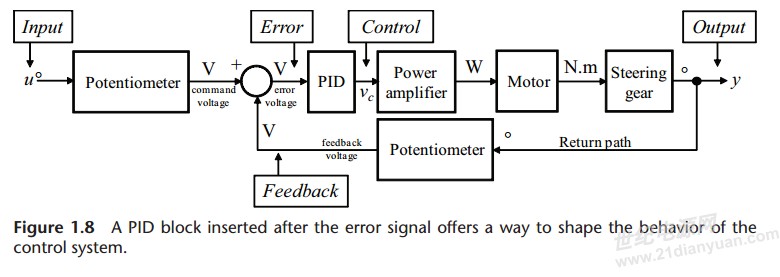

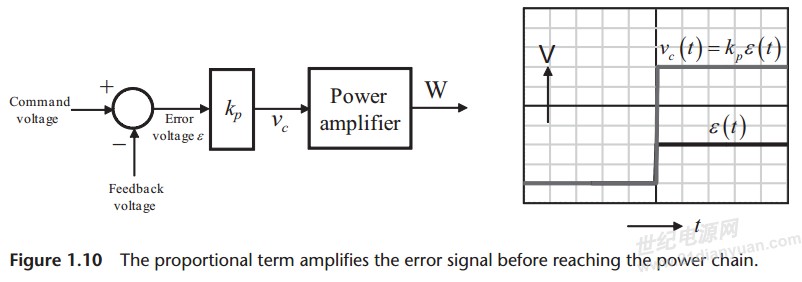
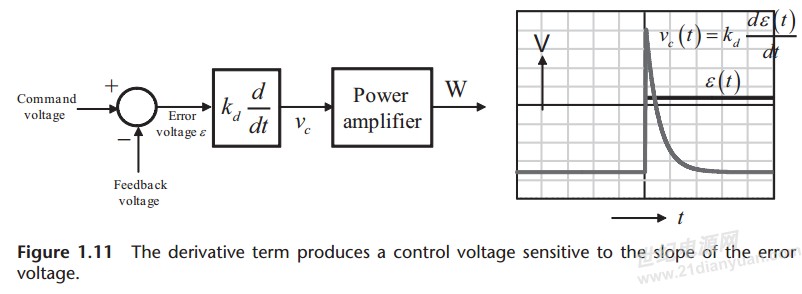
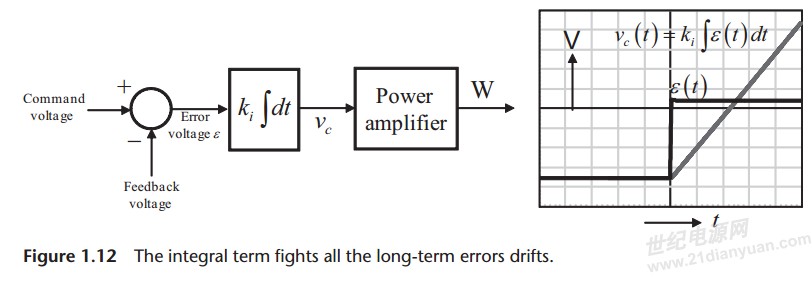

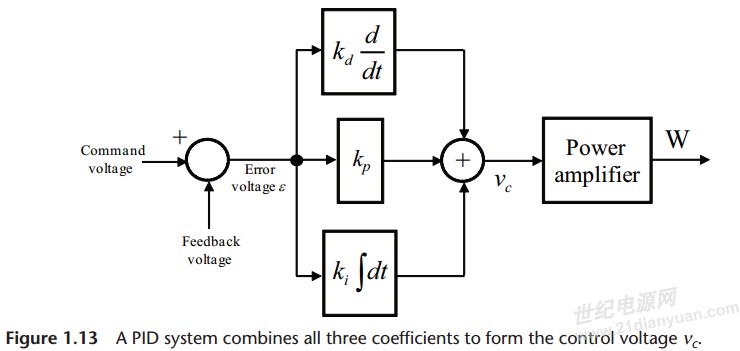
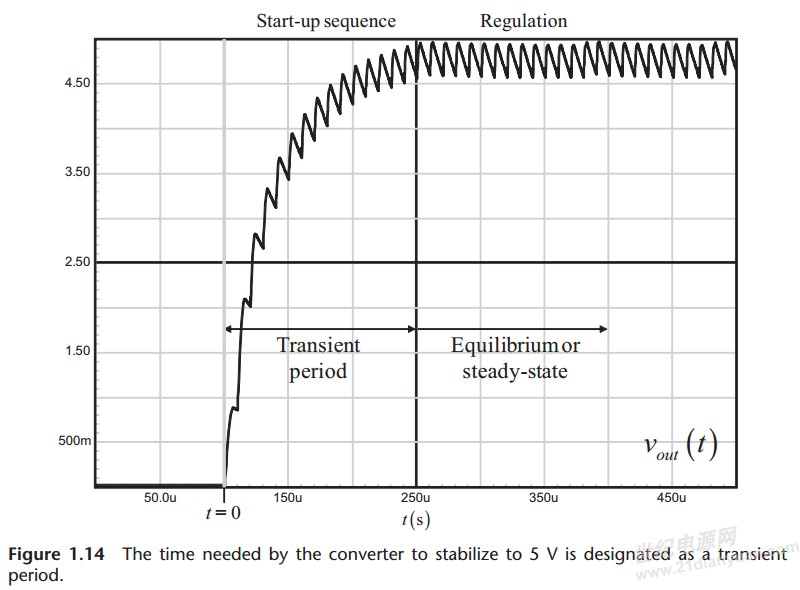
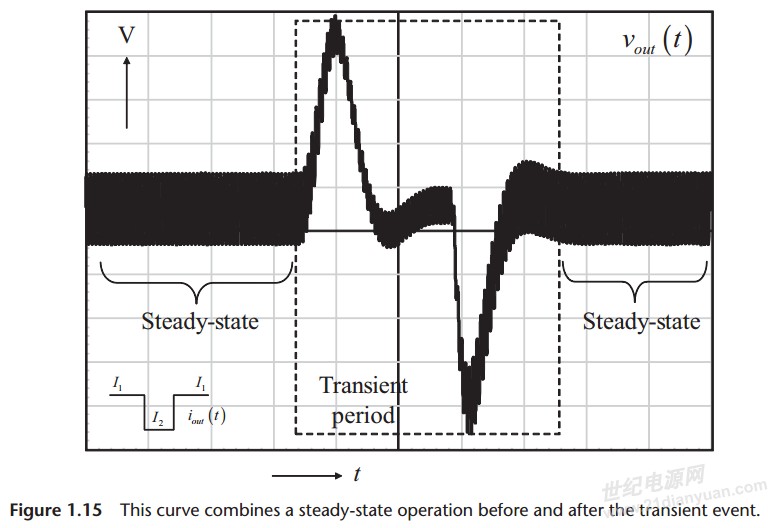
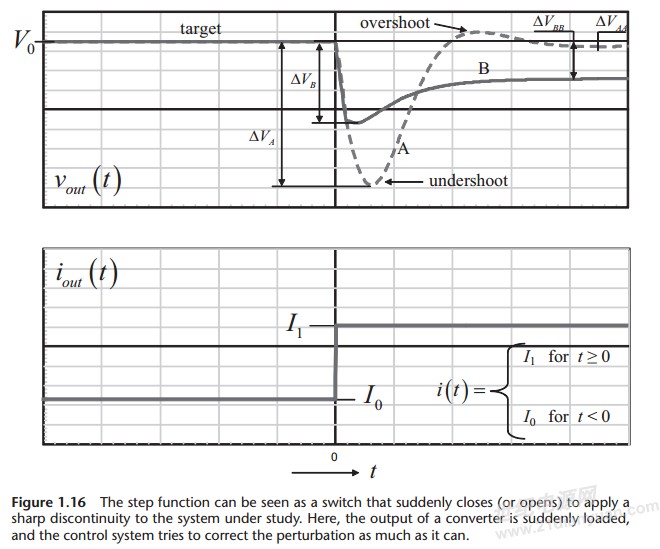
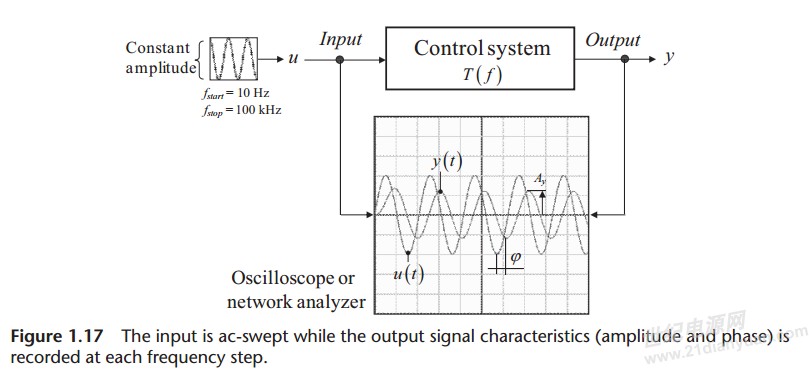



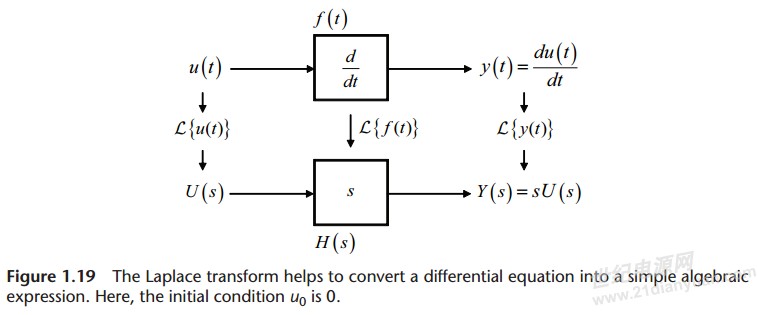
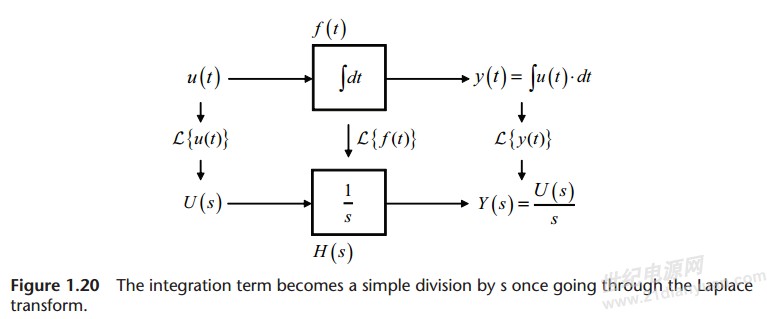
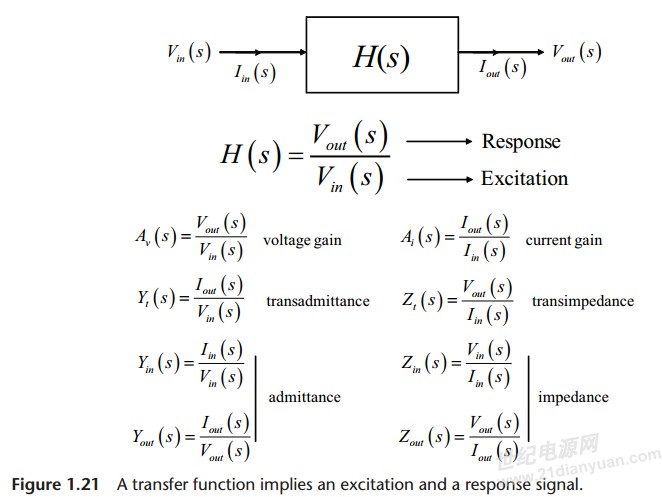





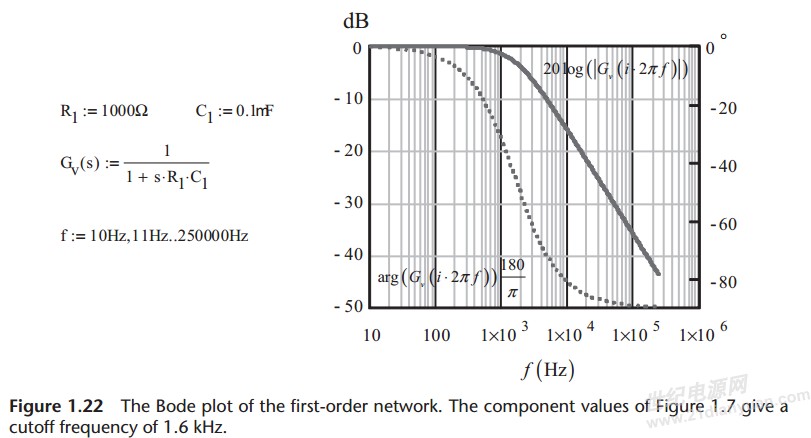
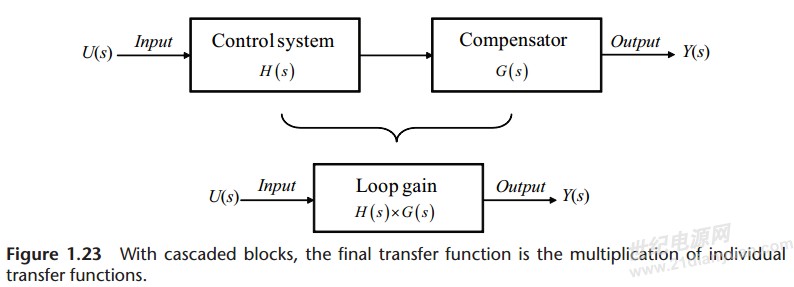


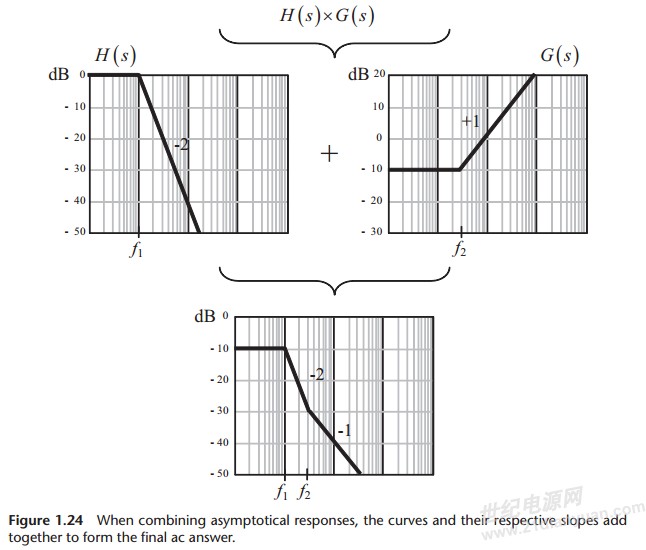



 津公网安备 12010402000296号
津公网安备 12010402000296号